3. Dynamika
W tym rozdziale poznamy prawa ruchu, czyli zasady pozwalające powiązać własności ruchu z przyczynami, które go wywołują. Przedyskutujemy przykłady pokazujące równoważność stanu spoczynku i ruchu jednostajnego prostoliniowego, wprowadzimy pojęcie układu inercjalnego i poznamy przypadki układów nieinercjalnych. Omówimy relacje pomiędzy siłą i przyspieszeniem i wprowadzimy pojęcie masy bezwładnej. Zobaczymy, że zapoczątkowana przez Galileusza i Newtona mechanika klasyczna potrafi opisać w postaci prostych praw niezwykłą złożoność ruchów, wśród których żyjemy.
11. Opis ruchu obrotowego
Opis ruchu obrotowego
Z ruchem obrotowym spotykamy się równie często jak z ruchem postępowym - zaczynając od otwierania drzwi, poprzez obracające się koła rowerów, samochodów czy pociągów, kręcące się wirniki silników elektrycznych, wirujące śmigła samolotów i helikopterów... aż po ruch planet i innych ciał niebieskich. Ruch obrotowy posiada szereg specyficznych cech zasługujących na uwagę i wyjaśnienie.
Powiedzieliśmy w lekcji trzeciej, że siły są przyczyną zmiany stanu ruchu ciał. Zmiana ta zależna jest nie tylko od samej wartości działającej siły, ale także od miejsca jej przyłożenia oraz kierunku jej działania. Rysunek 3.11.1 pokazuje cztery przykłady działania na drzwi tą samą siłą. W przypadkach \( A \) i \( D \) działająca siła nie spowoduje ruchu drzwi. W przypadku \( B \) potrzebne jest przyłożenie znacznej siły. Najłatwiej poruszyć drzwi przykładając siłę w pobliżu punktu \( C \) i tam właśnie instaluje się klamki.
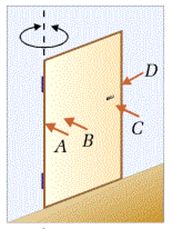
Rysunek 3.11.1. Skutek działania siły wywieranej na drzwi zależny jest od miejsca jej przyłożenia i kierunku jej działania.
{Na rysunku zostały przedstawione drzwi, których zawiasy znajdują się z lewej strony, a klamka z prawej. Drzwi mogą obracać się względem prostej zawierającej zawiasy w obie strony. Wektory A, B i C są prostopadłe do płaszczyzny drzwi i wszystkie znajdują się nieco poniżej klamki. Koniec wektor A znajduje się na lewej krawędzi drzwi, wektora C na prawej, a wektora B między A i C, bliżej A. Wektor D leży w tej samej płaszczyźnie co drzwi i jest skierowany prostopadle do prawej ich krawędzi. Jego koniec leży na tej krawędzi.}
Ten prosty przykład ilustruje specyficzne cechy ruchu obrotowego. Ruch odbywa się wokół określonej prostej, zwanej osią obrotu. Widzimy, że ważną rolę odgrywa odległość punktu przyłożenia siły od tej osi. Prędkość i przyspieszenie punktów poruszających się ruchem obrotowym też są zależne od odległości od osi obrotu, nie są więc jednakowe dla wszystkich punktów. Wspólny jest jednak kąt obrotu. Gdyby więc zamiast przemieszczenia liniowego rozważać przemieszczenie kątowe, opis byłby o wiele prostszy. Widać, że celowe jest wprowadzenie wielkości specyficznych dla ruchu obrotowego i dla nich formułowanie równań dynamiki.
Ruchem obrotowym bryły sztywnej nazywamy ruch, w którym wszystkie punkty bryły poruszają się po okręgach, których środki leżą na jednej prostej zwanej osią obrotu. Oś ta nie musi jednak zachowywać stałego położenia w czasie ruchu; może zmieniać swą orientację i może się przesuwać. Bardzo często mamy więc do czynienia z kombinacją ruchu postępowego i obrotowego. W lekcji trzeciej dowiedzieliśmy się, że ruch postępowy układu punktów materialnych możemy opisać zakładając, że wypadkowa wszystkich sił zewnętrznych działa na jeden punkt, którym jest środek masy układu. W czasie ruchu postępowego ciało może wykonywać także ruch obrotowy. Możemy jednak oddzielić ruch postępowy od obrotowego opisując ruch postępowy środka masy. Pozostaje wtedy tylko opis ruchu obrotowego.
Wyobraźmy sobie obracającą się tarczę. Prędkości różnych punktów tarczy są różne. Najszybciej poruszają się punkty na obwodzie tarczy, punkty położone bliżej osi poruszają się wolniej. Widzimy, że w opisie ruchu obrotowego pojęcie prędkości liniowej (2.3.1.1) należy zastąpić pojęciem prędkości kątowej jednakowej dla wszystkich punktów obracającego się ciała.
Położenie punktu materialnego poruszającego się po okręgu możemy określić poprzez kąt \( \varphi \), jaki zakreśla promień wodzący \( \vec{r} \) tego punktu. Kąt \( \varphi \) nazywamy drogą kątową.
Wartość prędkości kątowej równa jest pochodnej kąta zakreślanego przez promień wodzący względem czasu.
{Prędkość kątowa omega jest równa pochodnej kąta fi względem czasu t}
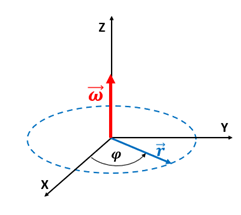
Rysunek 3.11.2. Określenie wektora prędkości kątowej
{Na rysunku przedstawiony jest prostokątny prawoskrętny układ współrzędnych X Y Z. Okrąg, po którym porusza się punkt materialny leży w płaszczyźnie X Y. Środek okręgu leży w początku układu współrzędnych. Kąt fi jest kątem jaki tworzy wektor położenia r z osią X układu współrzędnych. Wektor prędkości kątowej omega jest równoległy do osi Z i jego zwrot jest taki sam jak zwrot osi Z.}
Prędkość kątowa jest wektorem o kierunku pokrywającym się z osią obrotu. Zwrot wektora zgodny jest z regułą śruby prawoskrętnej. Przy zmianie kierunku ruchu obrotowego zwrot tego wektora zmieni się na przeciwny. Jednostką prędkości kątowej jest radian na sekundę (1 rad/s).
Ruch obrotowy ze stałą prędkością kątową opisuje się podając czas, w którym poruszające się ciało wykonuje jeden pełny obrót, czyli kiedy kąt obrotu wynosi \( 2 \pi \) {2 pi}. Czas ten, oznaczany jako T, nosi nazwę okresu w ruchu obrotowym. Liczbę obrotów wykonanych przez ciało w czasie jednej sekundy, czyli odwrotność okresu, nazywa się częstotliwością i oznacza zwykle jako \( v \) {ni} lub \( f \). Zapiszmy relacje pomiędzy tymi wielkościami.
{Prędkość kątowa omega jest równa ilorazowi 2 pi przez okres T}
{Częstotliwość ni jest odwrotnością okresu T}
{Prędkość kątowa omega jest równa iloczynowi 2 pi i częstotliwości ni}
Jednostką okresu jest sekunda (\( s \)), jednostką częstotliwości jest jeden herc (\( Hz \)); jego wymiarem jest odwrotność sekundy.
Kiedy prędkość kątowa zmienia się w czasie mówimy o ruchu obrotowym przyspieszonym. Przyspieszenie kątowe \( \vec{\varepsilon} \) {wektor epsilon}, które charakteryzuje zmianę prędkości kątowej w czasie, określamy jako pochodną prędkości kątowej względem czasu, czyli drugą pochodną drogi kątowej \( \varphi \) {fi} względem czasu
{Wektor przyspieszenia kątowego epsilonu jest równy pochodnej wektora prędkości kątowej omega względem czasu t i drugiej pochodnej drogi kątowej wektora fi}
gdzie (Rysunek 3.11.2)
{Wektor drogi kątowej fi jest równy iloczynowi wersora k i wartości drogi kątowej fi}
Kierunek i zwrot wektora przyspieszenia kątowego określony jest przez kierunek i zwrot zmiany prędkości kątowej.
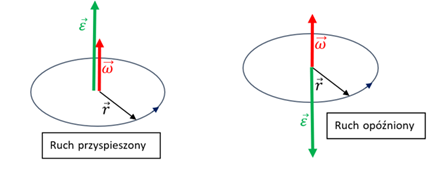
Rysunek 3.11.3. Zwrot przyspieszenia kątowego w przypadku stałej osi obrotu.
{Rysunek z lewej strony dotyczy ruchu przyspieszonego. Wektor epsilon ma taki sam kierunek i zwrot jak wektor omega. Rysunek z prawej strony dotyczy ruchu opóźnionego. Wektor epsilon ma taki sam kierunek jak omega, ale przeciwny zwrot}
Związek prędkości liniowej i kątowej
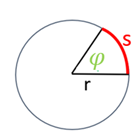
Rysunek 3.11.4. Związek między drogą liniową i kątową
{Okrąg o promieniu r. Kąt środkowy fi jest oparty na łuku o długości s}
Ponieważ (Rysunek 3.11.4):
{Długość łuku s jest równa iloczynowi promienia r i kąta środkowego fi}
stąd
{Wartość prędkości liniowej v jest równa pochodnej drogi liniowej s względem czasu, która jest równa iloczynowi r i pochodnej drogi kątowej fi względem czasu, który z kolei jest równy iloczynowi promienia r i wartości prędkości kątowej omega}
Powyższy związek można zapisać za pomocą wektorów:
{Wektor prędkości liniowej v jest iloczynem wektorowym wektora prędkości kątowej omega i wektora promienia r}
Prędkość liniowa jest iloczynem wektorowym prędkości kątowej i wektora położenia.
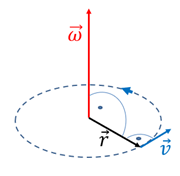
Rysunek 3.11.5. Związek między prędkością liniową i kątową.
{Wektory prędkości v, prędkości kątowej omega i promienia r są wzajemnie prostopadłe. Punkt materialny obiega okrąg w kierunku przeciwnym do ruchu wskazówek zegara. Wektor omega jest prostopadły do płaszczyzny okręgu i ma zwrot do góry. Wektor v jest styczny do okręgu. Wektor r ma początek w środku okręgu, a koniec w punkcie zaczepienia wektora prędkości v.}
Możemy wyrazić składową normalną wektora przyspieszenia przez prędkość kątową.
{Przyspieszenie normalne a_n jest równe ilorazowi drugiej potęgi prędkości liniowej v przez promień r, który możemy zapisać jako iloraz kwadratu iloczynu promienia r i prędkości kątowej omega przez promień r, co daje iloczyn promienia r i kwadratu prędkości kątowej omega}
gdzie \( r \) jest promieniem krzywizny toru.
Wartość przyspieszenia kątowego wiąże się ze składową styczną wektora przyspieszenia zależnością
{Przyspieszenie styczne a_s jest pochodną wartości prędkości liniowej v względem czasu, którą można zapisać jako pochodną iloczynu promienia r i prędkości kątowej omega względem czasu t. To z kolei można zapisać jako iloczyn promienia r i pochodnej prędkości kątowej omega względem czasu t, co daje iloczyn promienia r i wartości przyspieszenia kątowego epsilon}
przyjmujemy bowiem, że wartość \( r \) nie zmienia się w czasie.
Należy pamiętać, że powyższe relacje spełnione są przy założeniu, że ruch obrotowy zachodzi wokół ustalonej osi obrotu.