3. Dynamika
| Strona: | LeIA |
| Kurs: | Start z LeIA - przykładowy kurs |
| Książka: | 3. Dynamika |
| Wydrukowane przez użytkownika: | Gość |
| Data: | piątek, 10 lipca 2026, 11:10 |
Opis
W tym rozdziale poznamy prawa ruchu, czyli zasady pozwalające powiązać własności ruchu z przyczynami, które go wywołują. Przedyskutujemy przykłady pokazujące równoważność stanu spoczynku i ruchu jednostajnego prostoliniowego, wprowadzimy pojęcie układu inercjalnego i poznamy przypadki układów nieinercjalnych. Omówimy relacje pomiędzy siłą i przyspieszeniem i wprowadzimy pojęcie masy bezwładnej. Zobaczymy, że zapoczątkowana przez Galileusza i Newtona mechanika klasyczna potrafi opisać w postaci prostych praw niezwykłą złożoność ruchów, wśród których żyjemy.
Spis treści
- 1. Przyczyny ruchu
- 2. Zasady dynamiki
- 3. Równania Newtona
- 4. Siły bezwładności
- 5. Praca i moc
- 6. Siły zachowawcze i dyssypatywne
- 7. Energia potencjalna i kinetyczna
- 8. Prawo zachowania energii
- 9. Prawo zachowania pędu
- 10. Przykłady: zderzenia ciał
- 11. Opis ruchu obrotowego
- 12. Moment siły i moment pędu
- 13. Energia kinetyczna ruchu obrotowego
- 14. Moment bezwładności bryły sztywnej
- 15. Zasada zachowania momentu pędu
- 16. Pokazy z sali wykładowej Wydziału Fizyki PW
- 17. Zadania
- 17.1. Zadanie 1 (Zasady dynamiki Newtona)
- 17.2. Zadanie 2 (Ruch postępowy po równi pochyłej)
- 17.3. Zadanie 3 (Tarcie - równia pochyła)
- 17.4. Zadanie 4 (Maszyna Atwooda, czyli bloczek nieruchomy)
- 17.5. Zadanie 5 (układ mas w ruchu)
- 17.6. Zadanie 6 (warunek określonego ruchu)
- 17.7. Zadanie 7 (zasada zachowania pędu i energii)
- 17.8. Zadanie 8 (energia i praca)
- 17.9. Zadanie 9 (zderzenie niesprężyste)
- 17.10. Zadanie 10 (zderzenie centralne)
- 17.11. Zadanie 11 (zasada zachowania momentu pędu)
- 18. Nowe pojęcia, definicje i wyrażenia
1. Przyczyny ruchu
Przyczyny ruchu
Dynamika ruchu bada związki pomiędzy czynnikami wywołującymi ruch, a jego właściwościami. Przyczyną wywołującą ruch ciał materialnych i powodującą zmianę jego stanu są siły.
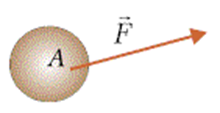
Rysunek 3.1.1. Siła \( \vec{F} \) przyłożona
w punkcie A
{W punkcie A należącym do kulistego ciała został zaczepiony wektor siły F, który został przedstawiony w postaci strzałki skierowanej ukośnie w górę – na godzinę drugą.}
Siła jest wielkością wektorową. Posiada określoną wartość, punkt przyłożenia, kierunek i zwrot. Siła \( \vec{F} \) (Rysunek 3.1.1) przyłożona jest do ciała w punkcie \( A \), zaś jej kierunek i zwrot wskazuje strzałka, której długość proporcjonalna jest do wartości siły.
Przyjrzyjmy się bliżej relacji pomiędzy siłą i ruchem. Stojący na szafie wazon nie porusza się (nie spada) choć wiemy, że działa na niego siła ciężkości. Zaczyna spadać, gdy pozbawimy go podpory, jaką jest górna ścianka szafy. Pod wpływem siły ciężkości jego prędkość wzrasta. Jeśli jest ciężki i spada z dużej wysokości, może uszkodzić stojącą na stole lampę, a przy tym i sam może ulec rozbiciu. W końcu jednak zatrzymuje się pomimo istnienia sił ciężkości.
Przykład ten pokazuje rozmaite relacje pomiędzy siłą i ruchem. W celu uogólnienia można zamiast wazonu rozważać ruch innych przedmiotów, można odmienić kierunek ruchu zamieniając spadanie w dół - wyrzucaniem do góry, a siłę ciężkości zamienić ciśnieniem gazów wybuchowych w lufie armatniej. Z kolei - zderzenie wazonu z lampą nie różni się w swej naturze od zderzeń pojazdów czy wreszcie - zderzeń cząstek elementarnych lub jąder atomowych.
Sformułujmy bardziej ogólnie wyniki obserwacji z naszego przykładu:
1. Kiedy pomimo działania siły (tu - siły ciężkości) ciało nie porusza się (wazon nie spada) – to znaczy, że na to ciało działa równocześnie jakaś inna równoważąca siła lub siły. Sumaryczna siła wynosi więc zero. Stan taki może trwać dowolnie długo, aż do chwili, kiedy siły działające na ciało przestają się równoważyć (pozbawiamy wazon podpory).
2. Działająca na ciało niezrównoważona siła (tu - siła ciężkości) zmienia stan jego ruchu - zamienia bezruch w ruch i zamienia małą prędkość w większą, czyli nadaje ciału przyspieszenie.
3. Działanie jednego ciała na drugie (wazonu na lampę) wywołuje reakcję ze strony drugiego ciała na pierwsze (lampy na wazon). Im większe działanie pierwsze, tym większe i drugie, ale skierowane w odwrotna stronę - ku pierwszemu.
Przykłady można mnożyć. Łączy je jedna wspólna cecha - wszelkie zmiany charakteru ruchu zachodzą pod wpływem sił wywieranych na ciało, zaś stan spoczynku jest rezultatem równowagi tych sił. Kiedy więc na ciało działają siły równoważące się lub nie działają żadne siły, charakter ruchu nie może się zmieniać - jeśli ciało jest w spoczynku, powinno w spoczynku pozostać, jeśli jest w ruchu - powinno pozostać w ruchu.
Galileusz jako pierwszy powiązał przypadek spoczynku i ruchu jednostajnego prostoliniowego, jako nie dające się odróżnić stany ruchu.

Rysunek 3.1.2. Galileusz (Galileo Galilei, 1564-1642). Ottavio Leoni, Public domain, via Wikimedia Commons,
{Rysunek przedstawia portret Galileusza}
2. Zasady dynamiki
Prawa ruchu zostały sformułowane przez Izaaka Newtona i przedstawione w 1686 w postaci trzech zasad dynamiki. Podany w pierwszej części wykładu przykład stanowi ilustrację zasad dynamiki. Trzy wysunięte tam wnioski odpowiadają trzem zasadom dynamiki sformułowanym przez Newtona. Zasady te omówimy teraz bardziej szczegółowo.
Rysunek 3.2.2. Isaac Newton (1642-1727), After Godfrey Kneller, Public domain, via Wikimedia Commons.
{Rysunek przedstawia portret Izaaca Newtona}
2.1. Pierwsza zasada Newtona
Pierwsza zasada Newtona
Zapiszmy pierwszą zasadę dynamiki w sposób podobny do oryginalnego sformułowania Newtona.
Zasadniczą wartością pierwszej zasady dynamiki jest wprowadzenie równoważności stanu spoczynku i stanu ruchu jednostajnego prostoliniowego. Rozpatrzmy to na przykładzie ruchu pociągów.
Kiedy siedzimy w przedziale wagonu jadącego pociągu, układem nieruchomym jest dla nas wagon, bo względem nas się nie porusza. Kiedy stoimy na peronie, układem nieruchomym jest stacja kolejowa. Oba te układy odniesienia są jednakowo dobre do badania stanu ruchu innych przedmiotów, jeśli tylko w czasie prowadzenia obserwacji, prędkość pociągu nie zmienia ani wartości, ani kierunku. Pasażer takiego pociągu nie może stwierdzić, czy pociąg stoi na stacji, czy jedzie z dużą prędkością, jeśli nie wyjrzy przez okno (zaniedbując efekty szumu, czy wibracji towarzyszących często ruchowi pociągu). Jego walizka na półce pozostawać będzie nieruchoma. Kiedy jednak pociąg nagle zahamuje, to walizka może spaść z półki, choć nikt z pasażerów jej w tym czasie nie dotyka. Jest to oczywista sprzeczność z pierwszą zasadą dynamiki rozpatrywaną w układzie odniesienia związanym z pociągiem. Układ taki nie jest więc dobrym układem odniesienia.
Układy, w których pierwsza zasada dynamiki jest spełniona, nazywamy układami inercjalnymi; układy, w których spełniona nie jest - układami nieinercjalnymi. Jadący pociąg może być układem inercjalnym, ale tylko wtedy, gdy wektor jego prędkości zachowuje stałą wartość, kierunek i zwrot. Zauważmy, że kiedy znany jest jeden układ inercjalny, to znanych jest ich nieskończenie wiele. Każdy bowiem układ poruszający się względem układu inercjalnego z dowolną, ale stałą co do wartości i kierunku prędkością, jest też układem inercjalnym. Pierwsza zasada dynamiki stanowi więc definicję układu inercjalnego.
2.2. Masa i środek masy
Masa i środek masy
W celu sformułowania drugiej zasady dynamiki konieczne jest wprowadzenie pojęcia masy. Newton określił masę jako miarę ilości materii, uważając tę jej właściwość za niezależną od stanu ruchu obiektów materialnych.
Jednostkę masy (kilogram, kg) wprowadziliśmy już w pierwszej lekcji. W drugiej, zdefiniowaliśmy pojęcie punktu materialnego. Teraz, każdemu obiektowi materialnemu przypiszemy masę \( m \) jako miarę jego bezwładności przy działaniu na ciało siły, która nadaje mu przyspieszenie.
Kiedy interesuje nas ruch układu wielu punktów materialnych, wprowadzamy pojęcie środka masy. Wektor położenia środka masy dla układu \( N \) punktów związany jest z masami \( m_i \) i promieniami wodzącymi \( \vec{r}_i \) wszystkich punktów wchodzących w skład układu wzorem:
{Wektor położenia środka masy r_s_m jest równy sumie po i zmieniającym się od 1 do N iloczynów mas punktów m_i przez odpowiadające im wektory położenia r_i podzielonej przez masę układu M}
gdzie
{Masa układu M jest równa sumie po i zmieniającym się od 1 do N mas punktów m_i}
jest masą całego układu.
Przykład obliczania środka masy układu punktów materialnych
Cztery punkty materialne o masach \( m_1 = 1g \), \( m_2 = 2g \), \( m_3 = 3g \), \( m_4 = 4g \) umieszczono w punktach o współrzędnych odpowiednio: \( m_1\ \left(-1, -4,\ 3\right) \); \( m_2\ \left(2,-1,-5\right) \); \( m_3\ \left(-3,\ 6,\ 0\right) \); \( m_4\ \left(-4, 0, -2\right) \).
Masa całego układu jest równa:
{Masa M jest równe sumie po i zmieniającym się od 1 do 4 wyrazów masa małe m_i, a to jest równe 10 gramów}
Wzór (3.4.1) opisujący położenie środka masy możemy zapisać za pomocą trzech wzorów – osobno dla każdej współrzędnej.
{Współrzędna x _s_m jest równa sumie po i zmieniającym się od 1 do 4 iloczynów mas punktów m_i przez współrzędne x_i podzielonej przez masę układu M}
{Współrzędna y_s_m jest równa sumie po i zmieniającym się od 1 do 4 iloczynów mas punktów m_i przez współrzędne y_i podzielonej przez masę układu M}
{Współrzędna z _s_m jest równa sumie po i zmieniającym się od 1 do 4 iloczynów mas punktów m_i przez z_i podzielonej przez masę układu M}
Podstawiając dane otrzymujemy:
{Współrzędna x_s_m jest równa sumie iloczynów 1 razy minus 1, 2 razy 2, 3 razy minus 3 i 4 razy minus 4 podzielonej przez 10, a to z kolei jest równe minus 2,2}
{Współrzędna y_s_m jest równa sumie minus 4, minus 2, plus 18 i plus zero podzielonej przez 10, a to z kolei jest równe 1,2}
{Współrzędna z_s_m jest równa sumie 3, minus 10, plus zero i minus 8 podzielonej przez 10, a to z kolei jest równe minus 1,5}
Wektor położenia środka masy układu czterech punktów możemy zapisać w postaci:
{Wektor r_s_m ma współrzędne minus 2,2; 1,2 oraz minus 1,5}
2.3. Wektor pędu
Dla ilościowego opisu ruchu ciała o danej masie wprowadza się pojęcie wektora pędu zdefiniowanego jako iloczyn masy ciała i wektora jego prędkości. Pęd jest wektorem, a jego kierunek zgodny jest z kierunkiem wektora prędkości.
{Wektor pędu p jest równy iloczynowi masy m i wektora prędkości v}
Pęd układu punktów materialnych stanowi wektorową sumę pędów wszystkich punktów wchodzących w jego skład
{Wektor pędu p jest równy sumie po i zmieniającym się od 1 do N wektorów pędu p_i zaś to z kolei równa się sumie po i zmieniającym się od 1 do N iloczynów mas m_i przez wektory prędkości v_i}
2.4. Druga zasada dynamiki
Kiedy na ciało działają siły, które nie równoważą się wzajemnie, to zgodnie z pierwszą zasadą dynamiki jego stan spoczynku lub ruchu jednostajnego prostoliniowego ulega zmianie - zmienia się wektor jego prędkości. Zmiana prędkości będzie tym większa, im większa siła będzie działać na ciało oraz kierunek zmiany prędkości będzie zgodny z kierunkiem działania siły. Z doświadczenia wiemy, że większą siłę trzeba przykładać do ciał o większej masie niż o mniejszej, by osiągnąć tę samą zmianę prędkości.
Druga zasady dynamiki wyraża związek pomiędzy zmianą pędu ciała w czasie, a siłą pod wpływem której zmiana ta zachodzi.
{Wektor siły F jest równy pochodnej wektora pędu p względem czasu t}
Pochodna pędu względem czasu informuje nas, jak szybko następuje zmiana pędu w czasie. Możemy więc drugą zasadę dynamiki sformułować w sposób następujący:
Jeśli przyjmiemy, że masa ciała podczas ruchu pozostaje stała, to równanie (3.2.4.1) możemy zapisać w postaci:
{Wektor siły F jest równy pochodnej wektora pędu p względem czasu t, a to jest równe pochodnej iloczynu masy m i wektora prędkości v względem czasu t, co jest równe iloczynowi masy m przez pochodną wektora prędkości v względem czasu t.}
Ponieważ:
{Pochodna wektora v względem czasu t jest równa wektorowi przyspieszenia a}
Stąd druga zasada dynamiki dla \( m = const \) może więc być sformułowana inaczej.
{Wektor siły F jest równy iloczynowi masy m i wektora przyspieszenia a}
gdzie \( \vec{a} \) jest wektorem przyspieszenia ciała.
2.5. Masa bezwładna i ciężar ciała
Masa bezwładna i ciężar ciała
Zapiszmy wzór \( \vec{F}=m\cdot\vec{a} \)
{Wektor F jest równy iloczynowi masy m i wektora przyspieszenia a}
w innej postaci. Kiedy na ciało o masie \( m \) działamy siłą \( \vec{F} \) , nadajemy mu przyspieszenie
{Wektor przyspieszenia a jest równy iloczynowi odwrotności masy m przez wektor siły F}
Przyspieszenie jest proporcjonalne do działającej na ciało siły, zaś współczynnikiem proporcjonalności jest odwrotność masy ciała. Oznacza to, że im większa jest masa ciała \( m \), tym większej musimy użyć siły, aby przyspieszenie ciała mogło pozostać bez zmian. Masa jest miarą bezwładności ciała, czyli „oporu” jaki ciało stawia sile, która zmienia stan jego ruchu.
Masa i ciężar ciała to nie to samo. Masa, która jest własnością danego ciała zwana jest też masą bezwładną w odróżnieniu od ciężaru ciała, który jest różny na Ziemi, na Księżycu lub w statku kosmicznym. Masa bezwładna jest współczynnikiem proporcjonalności w równaniu (3.2.4.4). Ciężar ciała jest wypadkową siły jaka działa na ciało wskutek przyciągania grawitacyjnego i siły odśrodkowej wynikającej z obrotowego ruchu Ziemi. Ciężar ciała możemy wyrazić za pomocą równania (3.2.4.4) jako
{Wektor ciężaru P jest równy wektorowi siły F_g, który jest równy iloczynowi masy m i wektora przyspieszenia ziemskiego g}
gdzie ciężar \( \vec{P} \) jest po prostu siłą działającą na ciało o masie \( m \) znajdujące się na powierzchni Ziemi, a \( \vec{g} \) jest wektorem przyspieszenia jakie uzyskuje ciało spadające swobodnie pod wpływem siły ciężkości w danym miejscu. Przyspieszenie \( \vec{g} \) zwane jest przyspieszeniem ziemskim i nie zależy od własności spadających przedmiotów, ale od masy Ziemi i odległości danego ciała od środka jej masy. Dlatego też inna jest wartość tego przyspieszenia na biegunie, inna na równiku, bowiem Ziemia nie jest idealną kulą; inna jest także wysokość nad powierzchnią Ziemi. Przybliżona wartość przyspieszenia ziemskiego wynosi \( 1\ g=9,81\ m/s^2 \) .
{Jeden niuton N jest równy ilorazowi iloczynu kilograma k g i metra m przez sekundę kwadrat}
Stosowaną niekiedy jednostką jest też kilogram siły. Jest to siła odpowiadająca ciężarowi masy \( 1 kg \) i wynosi \( 1\ kG\approx9,81\ N \).
Druga zasada dynamiki stanowi fundament całej fizyki klasycznej. W niezwykle prostej postaci wzoru (3.2.4.4) zawarte są prawa ruchu obiektów materialnych, poczynając od przykładowego wazonu spadającego z szafy, a kończąc na ruchu samolotów, rakiet i ciał niebieskich. Zasada ta wyznacza związek pomiędzy przyczyną (siła) i skutkiem jej działania (przyspieszenie) stanowiąc podstawę deterministycznego rozumienia praw fizyki wyrażanego przez tzw. zasadę przyczynowości. Zgodnie z tą zasadą znajomość warunków początkowych (położenia i prędkości ciała w danej chwili) oraz działających na to ciało sił, wyznacza jednoznacznie stan ich ruchu w dowolnej chwili. Zakres stosowalności drugiej zasady dynamiki wyznaczony został dopiero w początkach XX-go wieku poprzez mechanikę relatywistyczna i kwantową.
2.6. Trzecia zasada dynamiki
Wróćmy do naszego przykładu z wazonem. Kiedy stoi on na szafie, działają na niego wzajemnie równoważące się siły: siła przyciągania ziemskiego skierowana w dół i skierowana w górę siła reakcji podłoża jakim jest ścianka szafy. Siły te muszą znosić się wzajemnie, w przeciwnym bowiem przypadku wazon zacząłby się poruszać zgodnie z drugą zasadą dynamiki.
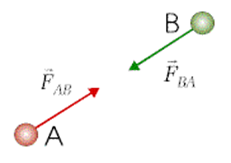
Rysunek 3.2.1. Wzajemne oddziaływanie dwóch ciał na siebie.
{Do ciała A zaczepiony jest wektor siły F_A_B. Do ciała B zaczepiony jest wektor siły F_B_A. Strzałki przedstawiające wektory sił mają ten sam kierunek i długość, ale przeciwne zwroty}
Ta relacja pomiędzy oddziałującymi na siebie ciałami stanowi treść trzeciej zasady dynamiki.
Kiedy ciało \( A \) działa na ciało \( B \) daną siłą \( \vec{F_{BA}} \), to ciało \( B \) działa na ciało \( A \) taką sama siłą, lecz przeciwnie skierowaną, \( {-\vec{F}}_{AB} \). Możemy to zapisać w postaci
{>Wektor siły F_B_A jest równy minus wektor siły F_A_B}
Wzór ten oznacza, że siły akcji i reakcji mają ten sam kierunek, równe wartości i przeciwne zwroty. Jeśli nazwiemy siłę pochodzącą od jednego ciała - siłą akcji, a pochodzącą od drugiego - siłą reakcji, to trzecią zasadę dynamiki możemy sformułować inaczej:
Siły akcji i reakcji zawsze występują parami, ale są przyłożone do różnych ciał. Gdyby były przyłożone do jednego ciała, to znosiłyby się wzajemnie i nie byłoby ruchów zmiennych.
3. Równania Newtona
Zasady dynamiki Newtona opisują wszelkie ruchy ciał makroskopowych (czyli takich, których masy są dużo większe od masy atomu) odbywające się z prędkościami małymi w stosunku do prędkości światła. Dlatego też często mechanikę opisującą ruchy ciał makroskopowych z niewielkimi prędkościami za pomocą zasad Newtona nazywamy mechaniką newtonowską.
3.1. Relacja siła - przyspieszenie
Relacja siła - przyspieszenie
Oszacujmy wartość siły, jaką działamy na gwóźdź, kiedy wbijamy go młotkiem w kawałek deski.
W tym celu skorzystajmy z równania wyrażającego drugą zasadę dynamiki dla przypadku ruchu młotka wbijającego gwóźdź.
{Siła F jest równa iloczynowi masy m i przyspieszenia a, a to z kolei równa się iloczynowi masy m przez pochodną prędkości v względem czasu t, co w przybliżeniu jest równe iloczynowi masy m i ilorazu przyrostu prędkości v przez przyrost czasu t.}
Założyliśmy, dla uproszczenia, że ruch młotka wbijającego gwóźdź jest ruchem jednostajnie opóźnionym, więc wartość opóźnienia uzyskujemy dzieląc różnicę \( \Delta v \) {delta v} prędkości początkowej υ0 i końcowej (zero) przez czas wbijania \( \Delta t \) {delta t}. Przyjmijmy, że masa młotka \( m = 0,5 kg \), prędkość w momencie uderzenia \( v_0 =10 m/s \) {v_0 jest równa 10 metrów na sekundę} i zagłębienie się gwoździa w deskę \( 1 cm \). Czas wbijania będzie ilorazem zagłębienia przez średnią prędkość równą połowie prędkości początkowej, czyli \( \Delta t = 0,002 s \) {delta t jest równa 0,002 sekundy}. Mamy więc,
{Siłą F jest równe iloczynowi 0,5 kilograma i ilorazu 10 metrów na sekundę przez 0,002 sekundy, co jest równe iloczynowi 0,5 kilograma przez 5000 metrów na sekundę kwadrat. To z kolei jest równe 2500 niutonów, czyli około 250 kilogramów}
Siła uderzenia półkilogramowym młotkiem trzykrotnie przekroczyła średni ciężar ciała człowieka (!). Nic dziwnego, że nie mamy szans wcisnąć gwoździa palcem. Opóźnienie (czyli ujemne przyspieszenia) ma w tym przypadku ogromną wartości \( 5000 \frac{m}{s^2} \) {5000 metrów na sekundę kwadrat}, wynikającą z krótkiego czasu uderzenia. Dlatego przy wbijaniu gwoździa deska musi spoczywać na twardym podłożu. To właśnie dlatego spadające na kamienną posadzkę naczynia na ogół kończą stłuczeniem się.
3.2. Układ równań Newtona
Układ równań Newtona
W rozdziale drugim podaliśmy definicję ruchu jednostajnie przyspieszonego. „Ruch, w którym przyspieszenie jest stałe co do wartości bezwzględnej i kierunku nazywamy ruchem jednostajnie przyspieszonym.”
Powstaje jednak pytanie - W jakich warunkach przyspieszenie zachowuje stałą wartość?
Potraktujmy to zagadnienie bardziej ogólnie i zapiszmy równanie (3.2.3.4) wyrażające treść drugiej zasady dynamiki pamiętając, że przyspieszenie jest drugą pochodną położenia względem czasu; wzór (2.5.1).
{Wektor siły F jest równy iloczynowi masy m przez wektor przyspieszenia a, co jest równe iloczynowi masy m przez pochodną wektora prędkości v względem czasu t. To z kolei jest równe iloczynowi masy m przez drugą pochodną wektora położenia r względem czasu t}
Wektory występujące w tym równaniu mają w przestrzeni trójwymiarowej po trzy składowe, które w układzie współrzędnych prostokątnych odpowiadają kierunkom osi układu. Po rozpisaniu równania (3.3.2.1) na składowe otrzymujemy układ trzech równań skalarnych zwanych równaniami Newtona.
{Składowa siły F_x jest równa iloczynowi masy m przez składową przyspieszenia a_x, co jest równe iloczynowi masy m przez pochodną składowej prędkości v_x względem czasu t. To z kolei jest równe iloczynowi masy m przez drugą pochodną współrzędnej x względem czasu t}
{Składowa siły F_y jest równa iloczynowi masy m przez składową przyspieszenia a_y, co jest równe iloczynowi masy m przez pochodną składowej prędkości v_y względem czasu t. To z kolei jest równe iloczynowi masy m przez drugą pochodną współrzędnej y względem czasu t}
{Składowa siły F_z jest równa iloczynowi masy m przez składową przyspieszenia a_z, co jest równe iloczynowi masy m przez pochodną składowej prędkości v_z względem czasu t. To z kolei jest równe iloczynowi masy m przez drugą pochodną współrzędnej z względem czasu t}
Są to podstawowe równania dynamiki. Ich konkretna forma określona jest przez rodzaj siły, która wywołuje ruch. O rodzaju ruchu ciała decyduje działająca nań siła.
2. Jeżeli siła jest stała, to ruch jest jednostajnie zmienny (jeśli masa ciała nie zmienia się tj., jeśli \( m = const \))
3. Jeżeli siła jest zmienna, to ruch jest zmienny, a jego charakter zależy od zmienności siły.
4. Siły bezwładności
Siły bezwładności
Siły bezwładności obserwujemy w układach nieinercjalnych, czyli poruszających się z przyspieszeniem. Wartość siły bezwładności jest wprost proporcjonalna do przyspieszenia układu i masy ciała. Kierunek jej jest taki sam jak kierunek przyspieszenia układu, a zwrot jest przeciwny do niego, Siła bezwładności wyraża się wzorem:
{Wektor siły F_b jest równy minus iloczyn masy m przez wektor przyspieszenia a_ukł}
Siły bezwładności nazywamy siłami pozornymi, ponieważ nie są to realne oddziaływania między ciałami. Ich przyczyną jest przyspieszenie układu odniesienia. Występują tylko w układach nieinercjalnych. Obserwując to samo ciało z układu inercjalnego, można jego ruch wyjaśnić tylko działaniem sił rzeczywistych - siły bezwładności w tym opisie w ogóle nie występują.
Wyjaśnimy to na konkretnym przykładzie. Wyobraźmy sobie, że na podłodze autobusu leży piłka. Pasażer autobusu i nieruchomy obserwator znajdujący się poza autobusem opiszą zachowanie piłki w odmienny sposób.
Kiedy autobus jedzie ze stałą prędkością (układ inercjalny), piłka ma taką samą prędkość jak autobus i pozostaje względem autobusu w spoczynku. Kiedy autobus przyspiesza (układ nieinercjalny), jego prędkość rośnie, ale prędkość piłki pozostaje taka, jak poprzednio. W rezultacie nieruchomy obserwator patrzący na piłkę z zewnątrz widzi, że autobus „ucieka” spod piłki - piłka pozostaje z tyłu, nie działa na nią żadna siła.
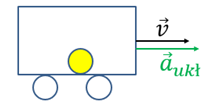
Rysunek 3.4.1. Piłka w układzie inercjalnym
{Do autobusu zaczepione są dwa wektory o kierunku poziomym i zwrocie w prawo – wektory prędkości v i przyspieszenia a_ukł. Na piłkę nie działa żadna siła.}
Natomiast pasażer autobusu widzi, że piłka zaczyna toczyć się do tyłu i interpretuje ruch piłki względem autobusu, jako wynik działania siły bezwładności, działającej przeciwnie do przyspieszenia autobusu.
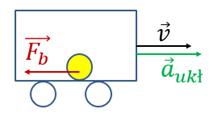
Rysunek 3.4.2. Piłka w układzie nieinercjalnym
{Do autobusu zaczepione są dwa wektory o kierunku poziomym i zwrocie w prawo – wektory prędkości v i przyspieszenia a_ukł. Do piłki znajdującej się w autobusie przyłożona jest siła F_b o kierunku poziomym i zwrocie w lewo.}
Przykład:
Oblicz siłę działającą na pasażera samochodu, który przy prędkości \( 60 km/h \) {60 kilometrów na godzinę} wpadł na drzewo. Strefa zgniotu w tym samochodzie wynosi \( 1m \), a masa pasażera \( 70kg \).
Rozwiązanie:
Zakładamy, że po uderzeniu w drzewo samochód porusza się ruchem jednostajnie przyspieszonym z przyspieszeniem ujemnym (ruch opóźniony). Prędkość końcowa równa jest zero, droga przebyta podczas hamowania wynosi \( 1m \). Przyspieszenie samochodu obliczymy ze wzorów na prędkość końcową i drogę w ruchu jednostajnie opóźnionym.
\( v_k=v_0-at=0 \)
{Prędkość v_k jest równa różnicy prędkości początkowej v_0 oraz iloczynu przyspieszenia a i czasu t, zaś to z kolei jest równe 0}
\( s=v_0t-\frac{at^2}{2} \)
{Droga s równa się różnicy iloczynu prędkości początkowej v_0 i czasu t oraz połowy iloczynu przyspieszenia a przez kwadrat czasu t}
Z pierwszego wzoru obliczamy czas hamowania i wstawiamy do drugiego:
\( s=v_0\cdot\frac{v_0}{a}-\frac{a}{2}\cdot\left(\frac{v_0}{a}\right)^2=\frac{{v_0}^2}{2a} \Rightarrow \ a=\frac{{v_0}^2}{2s} \)
{Droga s równa się różnicy iloczynu prędkości [początkowej v_0 przez iloraz prędkości początkowej v_0 i przyspieszenia a oraz iloczynu połowy przyspieszenia a przez kwadrat ilorazu prędkości początkowej v_0 i przyspieszenia a, co jest równe ilorazowi kwadratu prędkości początkowej v_0 przez dwukrotność przyspieszenie a. Stąd wynika, że przyspieszenie a jest równe ilorazowi kwadratu prędkości początkowej v_0 przez podwojoną drogę s}
Na pasażera w układzie nieinercjalnym (hamującym samochodzie) działa siła bezwładności skierowana do przodu równa.
\( F_b=m\cdot a=\frac{{{m\cdot v}_0}^2}{2s} \)
{Siła F_b jest równa iloczynowi masy m i przyspieszenia a, co jest równe ilorazowi iloczynu masy m i kwadratu prędkości [początkowej v_0 przez podwojoną drogę s}
Wstawiamy dane liczbowe: \( m = 70 kg \), \( v_0=60\ km/h=16,7\frac{m}{s} \) {v_0 jest równa 60 km na godzinę, co jest równe 16,7 metrów na sekundę}, \( s = 1m \) i otrzymujemy: \( F_b=9722\ N \), co odpowiada ciężarowi ciała o masie prawie 1 tony. Zauważmy, że siła ta jest wprost proporcjonalna do kwadratu prędkości początkowej, a więc dwukrotne zwiększenie prędkości skutkuje czterokrotnym zwiększeniem siły. Siła jest też odwrotnie proporcjonalna do drogi hamowania. Jeśli więc pojazd jest sztywny i podczas zderzenia odkształci się na przykład tylko o 10 cm, to siła bezwładności wzrośnie dziesięciokrotnie!
Innym przykładem jest przyspieszająca lub hamująca winda.
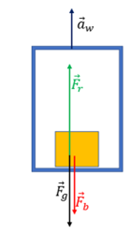
Rysunek 3.4.3. Winda poruszająca się w górę z przyspieszeniem \( a_w \) lub w dół z opóźnieniem \( a_w \)
{W windzie znajduje się skrzynia. Wektor przyspieszenia windy a_w ma kierunek pionowy i zwrot do góry. Do skrzyni zaczepione są 3 wektory mające kierunek pionowy. Wektor siły reakcji F_r ma zwrot do góry, a wektory siły bezwładności F_b i siły ciężkości F_g mają zwroty do dołu}
Kiedy winda rusza w górę z przyspieszeniem \( a_w \) (Rysunek 3.4.4), na skrzynię o masie m znajdującą się w niej, oprócz siły ciężkości \( F_g = mg \) {siła ciężkości F_g jest równa iloczynowi masy m i przyspieszenia ziemskiego g} , działa siła bezwładności \( F_b \) skierowana przeciwnie do przyspieszenia windy i równa \( m \cdot a_w \) . Całkowita siła przyciskająca skrzynię do podłogi wynosi więc: \( F=mg+ma_w \) {Siła F jest równa sumie iloczynu masy m i przyspieszenia ziemskiego g oraz iloczynu masy m i przyspieszenia windy a_w} i jest równa sile reakcji ze strony podłogi \( F_r \).

Rysunek 3.4.4. Winda poruszająca się w górę s opóźnieniem \( a_w \) lub w dół z przyspieszeniem \( a_w \)
{W windzie znajduje się skrzynia. Wektor przyspieszenia windy a_w ma kierunek pionowy i zwrot do dołu. Do skrzyni zaczepione są 3 wektory mające kierunek pionowy. Wektor siły reakcji F_r i wektor siły bezwładności F_b mają zwroty do góry, a wektor siły ciężkości F_g ma zwrot do dołu}
W sytuacji, kiedy winda porusza się w górę z opóźnieniem \( a_w \) (Rysunek 3. 4. 4), siła bezwładności działa w górę i odejmuje się od siły ciężkości: \( F=mg-ma_w \) {Siła F jest równa różnicy iloczynu masy m i przyspieszenia ziemskiego g oraz iloczynu masy m i przyspieszenia windy a_w} i jest równa sile reakcji ze strony podłogi \( F_r \).
Gdy winda będzie spadała swobodnie z przyspieszeniem ziemskim, wówczas wypadkowa siła działająca na pasażera znajdującego się w niej będzie równa zeru - pasażer będzie w stanie nieważkości.
5. Praca i moc
5.1. Praca
Praca
Praca \( \Delta W \) {delta W} stałej siły \( \vec{F} \) przy przemieszczeniu ciała o odcinek \( \vec{ \Delta s } \) {wektor delta s} określona jest jako iloczyn skalarny
{Praca delta W jest równa iloczynowi skalarnemu wektora siły F i wektora przemieszczenia delta s, który jest równy iloczynowi siły F, przemieszczenia delta s i cosinusa kąta alfa}
gdzie \( \alpha \) jest kątem pomiędzy kierunkiem działania siły, a kierunkiem przemieszczenia.
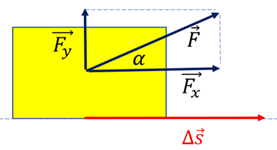
Rysunek 3.5.1.1. Siła, przemieszczenie i praca
{Do klocka leżącego na poziomej powierzchni zaczepione są dwa wektory: wektor F o kierunku i zwrocie wskazującym godzinę drugą i wektor delty s o kierunku i zwrocie wskazującym godzinę trzecią. Wektor F rozłożony jest na składową poziomą Fx o kierunku i zwrocie takim samym jak delta s oraz składową pionową Fy o zwrocie do góry wskazującą godzinę dwunastą. Kąt pomiędzy F i deltą s oznaczony został literą alfa.}
Na Rysunku 3.5.1.1 wektor siły \( \vec{F} \) został rozłożony na składowe: równoległą \( \vec{F_x} \) i prostopadłą \( \vec{F_y} \)do przemieszczenia \( \vec{\Delta s} \) {wektor delta s}.
Zauważamy, że praca wykonywana jest jedynie przez składową siły równoległą do kierunku ruchu. Składowa prostopadła żadnej pracy nie wykonuje, choć zmniejsza nacisk przesuwanego przedmiotu na podłoże.
Wzór (3.5.1.1) możemy zapisać w postaci:
{Praca delta W jest równa iloczynowi składowej siły równoległej do przemieszczenia F_x i wartość przemieszczenia delta s.}
Kiedy kąt \( \alpha \) pomiędzy kierunkiem działania siły, a kierunkiem przemieszczenia jest kątem ostrym, praca ma wartość dodatnią, kiedy rozwartym - ujemną; kiedy wynosi 900, praca wynosi zero. Siła, której kierunek jest przeciwny do kierunku ruchu wykonuje pracę ujemną.
Zauważmy, że mówimy tu o pracy wykonanej nad układem fizycznym jakim jest przesuwane ciało przez siły zewnętrzne, które to ciało przesuwają (człowiek, koń, traktor...). Uogólniając - praca wykonana nad układem fizycznym przez siły zewnętrzne jest dodatnia, a praca wykonana przez układ fizyczny kosztem energii tego układu (mechanicznej, cieplnej, elektrycznej itd.) jest ujemna. Definicję tę wykorzystywać będziemy wielokrotnie.
Do tej pory zakładaliśmy, że siła pozostaje stała przy przemieszczeniu ciała o odcinek \( \Delta s \). W ogólnym przypadku siła nie musi mieć stałego kierunku ani wartości. Kierunek ruchu ciała też może się zmieniać – może się ono poruszać po torze krzywoliniowym. Wówczas należy podzielić tor na maleńkie odcinki (elementarne przemieszczenia) dr o długościach dążących do zera, dla których siła pozostaje stała pod względem wartości, kierunku i zwrotu. Praca elementarna na takich odcinkach wynosi:
{Elementarna praca d W jest równa iloczynowi skalarnemu wektora siły F jako funkcji wektora położenia r ciała przez wektor elementarnego przemieszczenia d r}
Całkowitą pracę wykonaną podczas przesuwania ciała po torze krzywoliniowym pomiędzy punktami początkowym i końcowym możemy wyznaczyć sumując elementarne prace. Zauważmy przy tym, że są one równe iloczynom składowej siły stycznej do toru w danym punkcie przez wartość elementarnego przemieszczenia.
5.2. Moc
Szybkość wykonywania pracy przez daną siłę charakteryzuje moc \( P \), którą wyrażamy jako stosunek pracy \( dW \) do przedziału czasu \( dt \), w którym praca ta została wykonana.
{Moc P jest równa ilorazowi pracy elementarnej d W przez krótki przedział czasu d t, który jest równy ilorazowi iloczynu skalarnego wektora siły F i pochodnej wektora przemieszczenia r względem czasu t. To z kolei jest równe iloczynowi skalarnemu wektora siły F i wektora prędkości v}
Wzór (3.5.2.1) pokazuje, że moc wyrazić można także jako iloczyn skalarny wektora siły i wektora prędkości ciała, do którego siła ta jest przyłożona. Ponieważ wykonana praca prowadzi do zmiany energii układu fizycznego, moc charakteryzuje szybkość zmiany energii układu.
Za jednostkę pracy przyjmuje się pracę jednostkowej siły przy przesunięciu równym jednostce długości i kącie pomiędzy wektorami siły i przesunięcia równym zeru.
Jednostką mocy jest moc odpowiadająca jednostkowej pracy wykonanej w jednostce czasu.
Jednostką mocy w układzie SI jest jeden wat \( \left(1W=1\cdot\frac{J}{s}\right) \). {1 wat W jest równy ilorazowi 1 dżul J przez sekundę s}
6. Siły zachowawcze i dyssypatywne
Siły zachowawcze i dyssypatywne
Na Rysunku 3.6.1 przedstawiono schematycznie trasę narciarza, który wchodzi na górę o wysokości \( h \) z lewej strony wzniesienia (odcinek 1 - 2) przechodzi poziomy fragment trasy (odcinek 2 - 3), zjeżdża z prawej (odcinek 3 - 4), a następnie wraca do punktu wyjścia (odcinek 4 - 1).
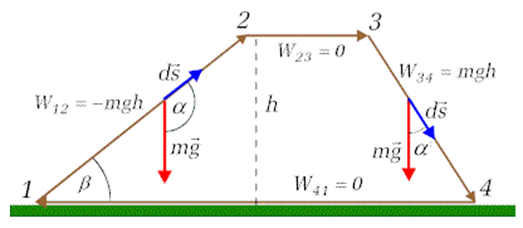
Rysunek 3.6.1. Schemat zamkniętego toru narciarza. Podane są wartości pracy wykonanej przez siłę ciężkości na poszczególnych odcinkach toru.
{Tor narciarza ma kształt trapezu o dłuższej podstawie 1-4; krótszej podstawie 2-3, lewym dłuższym ramieniu 1-2 i prawym krótszym ramieniu 3-4. Wektor siły ciężkości ma kierunek pionowy i zwrot w dół. Wektory d s są równoległe do ramion trapezu. Wektor d s dla lewego dłuższego ramienia trapezu ma zwrot do góry; dla krótszego w dół. Kąty między wektorami d s i wektorami siły ciężkości zostały oznaczone symbolem alfa. Natomiast kąt pomiędzy ramieniem 1-2 i podstawą 1-4 oznaczony jest symbolem beta.}
Wektor siły ciężkości, pokazany kolorem czerwonym, ma kierunek pionowy, a jego wartość wynosi \( mg \) {iloczyn masy m i przyspieszenia ziemskiego g} . Na pierwszym odcinku toru, od punktu 1 do punktu 2, zaznaczono elementarne przemieszczenie \( \vec{ds} \) {wektor d s} oraz kąt, jaki tworzy ono z kierunkiem siły ciężkości, analogicznie do oznaczeń na Rysunku 3.5.1.1. Wykorzystując wzór (3.5.1.1) możemy wyznaczyć wartość pracy \( W_{12} \) wykonanej przez siłę ciężkości na tym odcinku. Oznaczając przez \( s_{12} \) długość tego odcinka otrzymujemy
{Praca W _1_2 jest równa iloczynowi masy m, przyspieszenia ziemskiego g, długości odcinka s_1_2 i cosinusa kąta alfa, który równa się iloczynowi masy m, przyspieszenia ziemskiego g i cosinusa sumy kątów 90 stopni plus beta. To z kolei równa się minus iloczyn masy m, przyspieszenia ziemskiego g, długości odcinka s_1_2 i sinusa kąta beta, co jest równe minus iloczyn masy m, przyspieszenia ziemskiego g, długości odcinka s_1_2 i wysokości h podzielonej przez długość odcinka s_1_2}
Ostatecznie
{Praca W_1_2 jest równa minus iloczyn masy m, przyspieszenia ziemskiego g i wysokości h}
Zauważmy, że praca ta nie zależy od kąta nachylenia stoku. Na odcinku 3 - 4 wartość pracy będzie taka sama, ale znak będzie dodatni. W przypadku ruchu po poziomej części toru siła ciężkości nie wykonuje żadnej pracy, bowiem kierunek ruchu jest prostopadły do kierunku siły. Sumaryczna praca wyniesie więc
{Suma pracy W_1_2, W_2_3, W_3_4 i W_4_1 jest równa minus iloczyn masy m, przyspieszenia ziemskiego g i wysokości h plus zero plus iloczyn masy m, przyspieszenia ziemskiego g i wysokości h plus zero, co równa się zeru}
Otrzymaliśmy bardzo ważny wynik. Praca siły grawitacji po torze zamkniętym jest równa zeru. Łatwo zauważyć, że wniosek ten pozostanie słuszny także i wtedy, kiedy tor będzie miał dowolny, skomplikowany kształt. Zawsze bowiem możemy rozłożyć tor na sumę dowolnie małych odcinków prostoliniowych sprowadzając problem do rozpatrzonego powyżej.
Z faktu zerowania się pracy na torze zamkniętym wynika inny ważny wniosek. Praca potrzebna na przemieszenie ciała pod wpływem siły ciężkości pomiędzy dwoma dowolnymi punktami nie zależy od kształtu drogi, a jedynie od położenia samych punktów.
Dla dowolnie wybranego toru możemy znaleźć drugi tor stanowiący jego dopełnienie do toru zamkniętego (Rysunek 3.6.2).
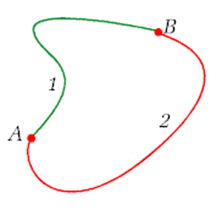
Rysunek 3.6.2. Praca po torze zamkniętym
{Dwa punkty A i B zostały połączone dwiema krzywymi, których początki znajdują się w punkcie A, a końce w punkcie B. Jeden z torów został nazwany 1, drugi 2}
Fakt zerowania się pracy na drodze zamkniętej zapiszemy w postaci:
{Suma pracy W_A_B_1 i pracy W_A_B_2 jest równa zeru}
Z drugiej strony, praca na tej samej drodze od punktu A do B i od B do A różni się tylko znakiem, np.
{Praca W_A_B_2 jest równa minus praca W_B_A_2}
Biorąc pod uwagę obie te zależności znajdujemy, że
{Praca W_A_B_1 jest równa pracy W_A_B_2}
W ruchu narciarza (i w większości innych ruchów) niebagatelną rolę odgrywają także siły oporu powietrza i siły tarcia przy poruszaniu się.
Siły tarcia i siły oporu ośrodka skierowane są zawsze przeciwnie do kierunku ruchu. Praca tych sił ma więc znak ujemny podczas całego ruchu. Sumaryczna praca po torze zamkniętym nie będzie więc dla tych sił równa zeru.
Jeśli praca wykonana przez siłę przy przemieszczeniu ciała po torze zamkniętym o dowolnym kształcie równa jest zeru, to siłę taką nazywamy siłą zachowawczą. Siłę, która nie spełnia tego warunku nazywamy siłą dyssypatywną lub rozpraszającą.
Przykładem siły zachowawczej jest siła ciężkości oraz siła sprężystości. Do sił dyssypatywnych zaliczamy siły tarcia i siły oporu powietrza.
W dalszej części kursu poznamy jeszcze inne przykłady obu rodzajów sił.
7. Energia potencjalna i kinetyczna
Energia, to możliwość wykonania pracy, zaś praca wykonana nad ciałem zmienia jego energię. Energia mechaniczna może występować pod dwoma postaciami: energii potencjalnej - związanej z położeniem ciała w przestrzeni, w której działają siły (przestrzeń taką nazywamy polem sił) oraz energii kinetycznej - związanej z jego ruchem.
7.1. Energia potencjalna
Energia potencjalna
Energię potencjalną definiujemy za pomocą wprowadzonego już pojęcia pracy.
Energia potencjalna ciała w danym punkcie, względem określonego punktu odniesienia, równa jest pracy jaką wykonują siły zachowawcze przy przemieszczeniu ciała z danego punktu do punktu odniesienia.
Nie bez powodu zaznaczyliśmy, że chodzi tu o pracę sił zachowawczych. Praca wykonywana przez siły dyssypatywne powoduje wydzielenie się ciepła, wywołuje różnorodne skutki zewnętrzne i zamienia się na inne niż mechaniczne rodzaje energii. Ta rozproszona energia nie stanowi energii potencjalnej ciała.
Stosując definicję energii potencjalnej do naszego przykładu z narciarzem stwierdzamy, że:
- energia potencjalna ciała w polu sił ciężkości w punktach o tej samej wysokości (2 i 3) oraz (1 i 4) jest taka sama,
- energia potencjalna w punkcie o wysokości \( h \) (na wierzchołku) względem punktu odniesienia (u podnóża góry) wynosi
{Energia potencjalna E_p jest równa iloczynowi masy m, przyspieszenia ziemskiego g i wysokości h}
taka jest bowiem praca sił ciężkości na trasie od wierzchołka do podnóża, \( W_{34} \) (zob. Rysunek 3.6.1)
{Praca W_A_B jest równa różnicy energii potencjalnej E_p_A i energii potencjalnej E_p_B, która jest równa minus różnicy energii potencjalnej E_p_B i energii potencjalnej E_p_A a to jest równe przyrostowi energii potencjalnej delta E_p ze znakiem minus}
Wartość i znak pracy siły zachowawczej przy przesunięciu ciała pomiędzy dwoma dowolnymi punktami określają ubytek energii potencjalnej ciała przy tym przesunięciu, tzn. wziętą ze znakiem minus różnicę energii potencjalnej w punkcie końcowym i początkowym.
Dla ilustracji zapiszmy to dla odcinka trasy narciarza pomiędzy punktami 3 i 4.
{Praca W_3_4 jest równa różnicy energii potencjalnej E_p_3 i energii potencjalnej E_p_4, która jest równa minus różnicy energii potencjalnej E_p_4 i energii potencjalnej E_p_3, a to jest równe przyrostowi energii potencjalnej delta E_p ze znakiem minus}
Kiedy ruch odbywa się wzdłuż kierunku działania siły, na przykład wzdłuż osi \( X \), możemy zapis wektorowy (3.5.1.3) zastąpić zapisem skalarnym otrzymując związek w postaci:
{Elementarna praca d W jest równe iloczynowi siły F i elementarnego przesunięcia d x, a to równa się minus elementarna zmiana energii potencjalnej d E_p}
lub
{Siła F jest równa minus iloraz elementarnej zmiany energii potencjalnej d E_p przez elementarne przesunięcie d x}
7.2. Energia kinetyczna
Ciało o masie \( m \) i prędkości \( v \) posiada energię kinetyczną wyrażoną wzorem:
{Energia kinetyczna E_k jest równa połowie iloczynu masy m i kwadratu prędkości v}
Związek pomiędzy pracą wykonaną nad danym ciałem, a zmianą jego energii kinetycznej możemy zapisać w postaci:
{Praca W_A_B jest równa różnicy energii kinetycznej E_k_B i energii kinetycznej E_k_A}
7.3. Twierdzenie o pracy i energii
Jeśli pracę nad ciałem wykonuje nie jedna, a wiele sił, to zmiana jego energii kinetycznej równa jest pracy wykonanej przez ich siłę wypadkową. Związek pomiędzy pracą wykonaną przez wypadkową sił działających na ciało, a zmianą jego energii kinetycznej - znany jest jako twierdzenie o pracy i energii.
Praca wykonana przez wypadkową sił działających na ciało równa jest zmianie jego energii kinetycznej.
Nie zawsze zmiana ta jest dodatnia. Praca sił grawitacji nad wyrzuconym do góry przedmiotem powoduje zmniejszenie jego prędkości. Podobny skutek wywołują siły dyssypatywne, jak siły tarcia i oporu powietrza. Prace różnych sił działających równocześnie na ciało mogą mieć różne znaki. Pamiętać jednak należy, że twierdzenie o pracy i energii odnosi się do pracy wykonanej przez wypadkową wszystkich działających na ciało sił.
Twierdzenie to ma wielkie znaczenie praktyczne przy rozwiązywaniu problemów, kiedy poszukujemy związku pomiędzy zmianą prędkości ciała a wykonaną nad nim pracą.
Z podanego wyżej określenia energii potencjalnej i kinetycznej wynika, że jednostki energii są takie same jak jednostki pracy.
8. Prawo zachowania energii
Prawo zachowania energii
Jeśli pracę nad ciałem przy przesunięciu z punktu A do B wykonują wyłącznie siły zachowawcze, spełniony jest związek:
{Praca W_A_B jest równa różnicy energii potencjalnej E_p_A i energii potencjalnej E_p_B, która jest równa różnicy energii kinetycznej E_k_B i energii kinetycznej E_k_A}
Wynika z niego, że
{Suma energii potencjalnej E_p_A i energii kinetycznej E_k_A jest równa sumie energii potencjalnej E_p_B i energii kinetycznej E_k_B}
Suma energii potencjalnej i kinetycznej dla dowolnie wybranych punktów \( A \) i \( B \) na drodze poruszającego się ciała jest taka sama. Oznacza to, że suma obu rodzajów energii, stanowiąca całkowitą energię mechaniczną ciała, pozostaje stała, kiedy ciało porusza się pod działaniem sił zachowawczych, czyli
{Suma energii potencjalnej E_p i energii kinetycznej E_k równa się constans}
Wzór ten wyraża prawo, zwane też zasadą, zachowania energii mechanicznej, które sformułować można następująco
Wzór (3.8.1) można także zapisać w postaci:
{M Minus różnica energii potencjalnej E_p_B i energii potencjalnej E_p_A jest równa różnicy energii kinetycznej E_k_B i energii kinetycznej E_k_A}
czyli
{minus zmiana energii potencjalnej delta E_p jest równa zmianie energii kinetycznej delta E_k}
Zapis ten określa prawo zmian energii potencjalnej i kinetycznej ciała, gdy działają na niego wyłącznie siły zachowawcze. Wówczas ubytkowi energii potencjalnej towarzyszy zawsze równy mu co do wartości bezwzględnej przyrost energii kinetycznej i vice versa.
Kiedy na ciało działają siły dyssypatywne zasada zachowania energii mechanicznej nie jest spełniona. Siły te zmieniają energię mechaniczną ciała. Następuje zamiana energii mechanicznej na inne rodzaje energii, np. energię cieplną, chemiczną, elektryczną, jądrową itp.
Zasadę zachowania energii możemy sformułować w sposób ogólny. Rozpatrzmy układ odosobniony, czyli taki, który w żaden sposób nie oddziałuje z otoczeniem, a więc nie wymienia ani energii, ani masy z otoczeniem i weźmy pod uwagę sumę wszystkich postaci energii w dowolnych procesach zachodzących w tym układzie. Nazwijmy tę energię - całkowitą energią układu.
Energia całkowita układu odosobnionego jest stała.
Zasada zachowania energii całkowitej należy do fundamentalnych zasad fizyki. Sformułowana została w oparciu o obserwacje i doświadczenia. Dotychczas nie znaleziono faktów przeczących jej słuszności. Ich poszukiwania doprowadziły natomiast do odkrycia wielu efektów fizycznych, których nieuwzględnienie interpretowano początkowo jako niezgodność z zasadą zachowania energii.
9. Prawo zachowania pędu
Prawo zachowania pędu
Przypomnijmy sobie drugą zasadę dynamiki, która mówi, że pochodna pędu ciała względem czasu równa jest sile działającej na ciało.
{Wektor siły F jest równy pochodnej wektora pędu p względem czasu t}
Równanie to można zastosować również do układu ciał. W takim przypadku \( \vec{F} \) oznacza wypadkową wszystkich sił zewnętrznych działających na układ, a \( \vec{p} \) wektorową sumę pędów wszystkich ciał układu, czyli całkowity pęd układu.
Kiedy wypadkowa sił zewnętrznych wynosi zero, to równa jest także zeru pochodna całkowitego pędu względem czasu, co oznacza, że sam pęd nie zmienia się, tzn. pozostaje stały co do wartości, kierunku i zwrotu. Stwierdzenie to wyraża zasadę zachowania pędu.
Zasadę tę można krótko zapisać w postaci:
Jeżeli \( \vec{F}=0 \) {wektor siły F jest równy zero} to \( \vec{p}=const \).
Zasada zachowania pędu jest kolejną fundamentalną zasadą fizyki.
Na szczególne podkreślenie zasługuje niezależność całkowitego pędu układu od wszelkich oddziaływań wewnętrznych pomiędzy jego elementami. Kiedy więc jakiś element układu uzyskuje pęd w wyniku zachodzących w układzie procesów, pozostała część układu uzyskuje pęd o tej samej wartości, lecz przeciwnie skierowany. To właśnie zachowanie pędu jest podstawą działania silników odrzutowych i rakietowych, jest też powodem odrzutu przy strzałach z broni palnej itd. Bardzo ciekawym wizualnie przykładem zachowania pędu jest kulisty kształt rozpryskujących się fajerwerków, gdzie suma pędów wszystkich fragmentów pocisku musi byś bliska zeru, bo taki jest pęd pocisku u wierzchołka lotu, a siły wybuchu są siłami wewnętrznymi w układzie fajerwerku jako całości.
Warto też dodać, że pęd układu nie może być zamieniony na coś innego, w odróżnieniu od energii mechanicznej, która może ulec zamianie na inne rodzaje energii. Zasada zachowania pędu obowiązuje więc także w procesach, w których naruszona jest zasada zachowania energii mechanicznej.
10. Przykłady: zderzenia ciał
Zderzenie, to proces, w którym na uczestniczące w nim ciała działają wielkie siły, ale w stosunkowo krótkim czasie. Wynikają z tego ważne dla praktycznej analizy wnioski:
1. Działające podczas zderzenia siły są na ogół o wiele większe od innych, długotrwałych sił zewnętrznych działających równocześnie. Te inne siły można na ogół pominąć rozpatrując proces zderzenia.
2. Czas zderzenia jest na tyle krótki, że wyraźnie można wydzielić stan zderzających się ciał „przed” i „po” zderzeniu.
3. Siły występujące podczas zderzenia można zaliczyć do sił wewnętrznych działających w układzie zamkniętym który stanowią zderzające się obiekty, zgodnych z trzecią zasadą dynamiki. (Takie siły nazywa się siłami newtonowskimi.)
Jeżeli podczas zderzenia zachowana jest energia kinetyczna, to zderzenie takie nazywamy zderzeniem sprężystym, jeżeli zachowana nie jest - zderzeniem niesprężystym. Prawo zachowania pędu stosować można zawsze, jeśli tylko założenie o braku sił zewnętrznych działających na układ jest spełnione. (W praktyce, można stosować często i w przypadkach, gdy na układ zderzających się ciał działają siły zewnętrzne ze względu na wymienioną w punkcie 1. właściwość zderzeń). Jeśli przed zderzeniem ciała poruszały się wzdłuż jednej prostej, to ich zderzenie nazywamy centralnym, jeśli wzdłuż prostych nie pokrywających się, to zderzenie nazywamy niecentralnym lub peryferycznym.
10.1. Zderzenia sprężyste
Zderzenia sprężyste
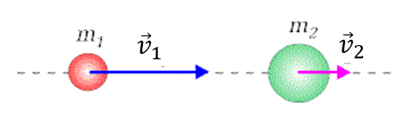
- Rozpatrzymy przykład sprężystego zderzenia centralnego, na przykładzie zderzenia kul o masach \( m_1 \) i \( m_2 \) poruszających się wzdłuż jednej prostej z prędkościami \( v_1 \) i \( v_2 \) w danym układzie odniesienia.
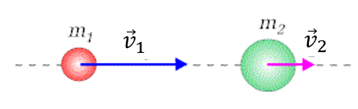
Rysunek 3.10.1.1. Kule poruszające się z różnymi prędkościami wzdłuż jednej prostej \( m_1 \) i \( v_1 \) oraz iloczynu \( m_2 \) i \( v_2 \)
{Do obu kul zaczepione są wektory prędkości o kierunku poziomym i zwrocie w prawo. Kula mniejszej o masie m_1 znajduje się z lewej strony i ma prędkość v_1. Kula większa o masie m_2 znajduje się z prawej strony i ma prędkość v_2}
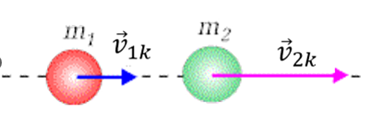
Zapiszmy prawa zachowania. Mówią one, że suma pędów oraz energii kinetycznych przed i po zderzeniu są sobie równe. Oznaczymy prędkości kul po zderzeniu odpowiednio \( v_{1k} \) i \( v_{2k} \). Rozpatrujemy przypadek jednowymiarowy, wiec zasadę zachowania pędu zapiszemy w postaci skalarnej zakładając, że zwroty wszystkich wektorów pędów są jednakowe.
Prawo zachowania pędu:
{Suma iloczynu masy m_1 i prędkości v_1 oraz iloczynu masy m_2 i prędkości v_2 jest równa sumie iloczynu masy m_1 i prędkości v_1_k oraz iloczynu masy m_2 i prędkości v_2_k}
Prawo zachowania energii:
{Suma połowy iloczynu masy m_1 przez drugą potęgę prędkości v_1 oraz połowy iloczynu masy m_2 przez drugą potęgę prędkości v_2 jest równa sumie połowy iloczynu masy m_1 przez drugą potęgę prędkości v_1_k oraz połowy iloczynu masy m_2 przez drugą potęgę prędkości v_2_k}
Przepiszmy te równania nieco inaczej przenosząc na prawą stronę wyrazy z \( m_1 \), a na prawą wyrazy z \( m_2 \). Równanie (3.10.1.1) zapisujemy w postaci:
{IIloczyn masy m_1 przez różnicę prędkości v_1 i prędkości v_1_k jest równy iloczynowi masy m_2 przez różnicę prędkości v_2_k i prędkości v 2}
Analogicznie przepisujemy równanie (3.10.1.2)
{Iloczyn masy m_1 przez różnicę kwadratów prędkości v_1 i prędkości v_1_k jest równy iloczynowi masy m_2 przez różnicę kwadratów prędkości v_2_k i prędkości v_2}
Dzieląc stronami równanie (3.10.1.4) przez (3.10.1.3) i wykonując elementarne działania arytmetyczne otrzymujemy związek, który jest niezależny od mas zderzających się kul. (Zakładamy, że różnice prędkości w równaniu (3.10.1.3) nie są równe zeru.)
{Suma prędkości v_1 i prędkości v_1_k jest równa sumie prędkości v_2 i prędkości v_2_k}
Związek ten można przepisać w postaci:
{Różnica prędkości v_1 i prędkości v_2 jest równa różnicy prędkości v_2_k i prędkości v_1_k}
Prędkość zbliżania się kul przed zderzeniem równa jest prędkości ich oddalania się po zderzeniu czyli ich prędkości względne przed i po zderzeniu są takie same.
Możemy teraz wyznaczyć prędkości kul po zderzeniu. Z równania (3.10.1.6) widać, że
{Prędkości v_2_k jest równa prędkości v_1 minus prędkość v_2 plus prędkości v_1_k}
Podstawiając to do równania (3.10.1.7) możemy wyznaczyć prędkość pierwszej kuli po zderzeniu:
{Prędkość v_1_k jest równa sumie iloczynu prędkości v_1 i ilorazu różnicy masy m_1 i masy m_2 przez sumę masy m_1 i masy m_2 oraz iloczynu prędkości v_2 i podwojonego ilorazu masy m_2 przez sumę masy m_1 i masy m_2}
Podobnie uzyskuje się wzór na prędkość drugiej kuli po zderzeniu
{Prędkość v_2_k jest równa sumie iloczynu prędkości v_2 i ilorazu różnicy masy m_2 i masy m_1 przez sumę masy m_1 i masy m_2 oraz iloczynu prędkości v_1 i podwojonego ilorazu masy m_1 przez sumę masy m_1 i masy m_2}
Uzyskaliśmy poszukiwane wzory ogólne na prędkości kul po zderzeniu. Rozpatrzmy teraz kilka szczególnych i ciekawych przypadków podstawiając założone warunki do wzorów (3.10.1.8) i (3.10.1.9). Zamieszczona poniżej tabela określa te warunki i pokazuje ich ilustrację graficzną przed i po zderzeniu.
Tabela 2. Różne przypadki zderzeń sprężystych kul
|
Warunek |
Przed zderzeniem |
Po zderzeniu |
|
|---|---|---|---|
|
A |
\( m_1 = m_2 \) {masa m_1 jest równa masie m_2} |
{Dwie kule o masach m_1 i m_2 poruszają się
wzdłuż jednej prostej w prawo. Kula m_2 znajdująca się z prawej strony porusza
się z prędkością v_2. Kula o masie m_1 znajdująca się z lewej strony porusza
się z prędkością v_1 . Środki obu kul leżą na prostej wzdłuż której poruszają
się kule.} |
{Dwie kule o masach m_1 i m_2 poruszają się
wzdłuż jednej prostej w prawo. Kula m_2 znajdująca się z prawej strony porusza
się z prędkością v_2_k. Kula o masie m_1 znajdująca się z lewej strony porusza
się z prędkością v_1_k} |
|
kule wymienią się prędkościami |
\( v_{k1} = v_2 \) oraz \( v_{2k} = v_1 \) {Prędkość v_1_k jest równa prędkości v_2.
Prędkość v_2_k jest równa prędkości v_1} |
||
|
B |
\( \begin{array}{{>{\displaystyle}l}} m_{1}= m_{2}\\ v_{2} =0 \end{array} \) {masa m_1
jest równa masie m_2. Prędkość v_2 jest równa zero} |
{Kula o masie m_2 znajdująca się z prawej strony nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w prawo z prędkością v_1} |
{Kula o masie m_1 znajdująca się z lewej strony nie porusza się. Kula o masie m_2 znajdująca się z prawej strony porusza się w prawo z prędkością v_2 k} |
|
pierwsza kula zatrzymuje się po zderzeniu, druga porusza się z prędkością pierwszej przed zderzeniem |
\( v_1 = 0 \) oraz \( v_{2k}=v_1 \) {Prędkość v_1_k jest równa zero. Prędkość v_2_k
jest równa prędkości v_1} |
||
|
\( \begin{array}{{>{\displaystyle}l}} m_{2} \gg m_{1}\\ v_{2} =0 \end{array} \) {masa m_2 jest dużo większa od masy m_1. Prędkość v_2 jest równa zero} |
{Kula o masie m_2 znajdująca się z prawej strony
nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w
prawo z prędkością v_1} |
{Kula o masie m_2 znajdująca się z prawej strony
nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w
lewo z prędkością v_1_k} |
|
|
pierwsza kula odbije się z prawie niezmienioną prędkością, druga (praktycznie) pozostaje w spoczynku |
\( v_{1k}\cong{-v}_1 \) oraz \( v_{2k}\cong0 \) {Prędkość v_1_k jest w przybliżeniu równa minus
prędkości v_1. Prędkość v_2_k jest w przybliżeniu równa zeru} |
||
|
D |
\( \begin{array}{{>{\displaystyle}l}} m_{2} \ll m_{1}\\ v_{1} =0 \end{array} \) {masa m_2 jest dużo mniejsza od masy m_1. Prędkość v_2 jest równa zero} |
{Kula o masie m_2 znajdująca się z prawej strony nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w prawo z prędkością v_1} |
{Obie kule poruszają się wprawo. Kula o masie m_2 znajdująca się z prawej strony porusza się z prędkością v_2_k. Kula o masie m_1 znajdująca się z lewej strony porusza się w prawo z prędkością v_1_k} |
|
pierwsza kula prawie nie zmieni swej prędkości, druga uzyska podwójną prędkość pierwszej |
\( v_{1k}\cong v_1 \) oraz \( v_{2k}\cong2\cdot v_1 \) {Prędkość v_1_k jest w przybliżeniu równa
prędkości v_1. Prędkość v_2_k jest w przybliżeniu równa podwojonej prędkości
v_1} |
10.2. Zderzenia niesprężyste
Zderzenia niesprężyste
Gdyby po zderzeniu kule zlepiły się i dalej poruszały wspólnie z tą samą prędkością \( v_{12} \) mielibyśmy do czynienia ze zderzeniem całkowicie niesprężystym, zwanym też - doskonale plastycznym. W takim zderzeniu nie jest zachowana energia kinetyczna, kule zwykle ulegają odkształceniu i rozgrzaniu, pewna energia zużyta jest na ich zlepienie itp. Spełnione jest jednak prawo zachowania pędu.
{Suma iloczynów masy m_1 i prędkości v_1 oraz masy m_2 i prędkości v_2 jest równa iloczynowi sumy masy m_1 i masy m_2 przez prędkość v_1_2}
Z równania tego wyznaczmy wspólną prędkość \( v_{12} \) połączonych razem kul
{Prędkość v_1_2 jest równa ilorazowi sumy iloczynów masy m_1 i prędkości v_1 oraz masy m_2 i prędkości v_2 przez sumę masy m_1 i masy m_2}
Sprawdź, że zachodzi nierówność:
{Energia kinetyczna E_k_1_2 jest mniejsza od sumy energii kinetycznej E_k_1 i energii kinetycznej E_k_2}
gdzie
{Energia kinetyczna E_k_1_2 jest równa iloczynowi sumy masy m_1 i masy m_2 przez połowę kwadratu prędkości v_1_2}
oraz
{Suma energii kinetycznej E_k_1 i energii kinetycznej E_k_2 jest równa sumie połowy iloczynu masy m_1 przez kwadrat prędkości v_1 oraz połowy iloczynu masy m_2 przez kwadrat prędkości v_2}
W układzie odniesienia poruszającym się z prędkością \( v_{12} \) pęd połączonych z sobą kul wynosi oczywiście zero, ponieważ w swoim własnym układzie kule nie poruszają się. Wynika stąd ciekawy wniosek. Prędkość \( v_{12} \), to prędkość, przy której sumaryczny pęd kul był równy zeru także przed zderzeniem, co wynika bezpośrednio z zasady zachowania pędu. Konsekwentnie - także sumaryczny pęd kul po zderzeniu sprężystym musi być równy zeru w tym układzie, ponieważ jest równy pędowi kul przed zderzeniem. Układ, w którym sumaryczny pęd wszystkich ciał wchodzących w jego skład równy jest zeru nazywamy układem środka masy.
Wahadło balistyczne
Przykładem, w którym wykorzystujemy prawo zachowania pędu w procesie zderzenia niesprężystego, jak i prawo zachowania energii dla sił zachowawczych, jest tzw. wahadło balistyczne służące do pomiaru szybkości pocisków.
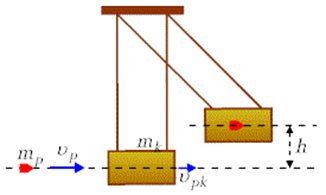
Rysunek 3.10.2.1. Wahadło balistyczne
{Rysunek przedstawia prostopadłościenny klocek o
masie m_1 zawieszony na dwóch pionowych nitkach zaczepionych u góry do poziomej
belki. Pozioma przerywana linia jest poziomą osią symetrii klocka. Po lewej
stronie klocka w niedużej odległości od niego na poziomej osi symetrii klocka
znajduje się pocisk o masie m_p, do którego zaczepiony jest wektor v_p
wskazujący godzinę trzecią. Do wiszącego klocka zaczepiony jest wektor v_p_k
również wskazujący godzinę trzecią. Na rysunku został także przedstawiony taki
sam klocek, ale z pociskiem znajdującym się w jego środku. Drugi klocek
znajduje się z prawej strony wyżej o h od pierwszego. Nitki na których wisi
drugi klocek są odchylone od pionu i wskazują godzinę piątą.}
Wahadło to
stanowi kloc drewniany o masie \( m_k \) zawieszony na lekkiej linie. Pocisk
o masie \( m_p \) poruszający się z prędkością \( v_p \) uderza w kloc i grzęźnie w nim, a
cały układ uzyskuje prędkość \( v_{pk} \). Jest to typowy przykład zderzenia niesprężystego, w którym energia
mechaniczna nie jest zachowana.
Prawo zachowania pędu jest spełnione i wymaga, aby
{Iloczyn masy m_p i prędkości v_p jest równy iloczynowi sumy masy m_p i masy m_k przez prędkość v_p_k}
Po uderzeniu pocisku wahadło uzyskuje prędkość \( v_{pk} \) i energię kinetyczną
{Energia kinetyczna E_k_u jest równa iloczynowi połowy sumy masy m_p i masy m_k przez drugą potęgę prędkości v_p_k}
Układ znajduje się pod działaniem zachowawczej siły ciężkości, która sprawia, że prędkość wahadła zmniejsza się do zera po osiągnięciu wysokości h, zaś cała energia kinetyczna układu zamienia się w energię potencjalną. Możemy więc teraz zastosować prawo zachowania energii. Otrzymujemy związek
{Iloczyn połowy sumy masy m_p i masy m_k przez drugą potęgę prędkości v_p_k jest równy iloczynowi sumy masy m_p i masy m_k przez przyspieszenie ziemskie g i wysokość h}
skąd wyznaczamy prędkość początkową układu
{Prędkość v_p_k jest równa pierwiastkowi z podwojonego iloczynu przyspieszenia ziemskiego g i wysokości h}
a ze wzoru (3.10.2.6) - prędkość pocisku
{Prędkość v_p jest równa iloczynowi ilorazu sumy masy m_p i masy m_k przez masę m_p oraz pierwiastka z podwojonego iloczynu przyspieszenia ziemskiego g i wysokości h}
Znając prędkość, możemy wyznaczyć energię kinetyczną pocisku
{Energia kinetyczna E_k_p jest równa połowie iloczynu masy m_p przez drugą potęgę prędkości v_p. To z kolei jest równe iloczynowi kwadratu sumy masy m_p i masy m_k oraz przyspieszenia ziemskiego g i wysokości h podzielonemu przez masę m_p}
oraz stosunek energii kinetycznej pocisku do energii kinetycznej układu
{Stosunek energii kinetycznej E_k_p do energii kinetycznej E_k_u jest równy stosunkowi sumy masy m p i masy m k do masy m_p, zaś to z kolei równa się sumie 1 i ilorazu masy m_k przez masę m_p, co jest dużo większe od 1}
Stosunek ten jest znacznie większy niż 1 bowiem masa kloca jest zwykle znacznie większa od masy pocisku. Stracona energia mechaniczna zamieniła się na ciepło powodując rozgrzanie pocisku i kloca.
Doświadczenia
Sfilmowaliśmy doświadczenia wykonane z wykorzystaniem zestawów kul:
| Zderzenia sprężyste - pięć jednakowych kul | |
|---|---|
| |
Pięć jednakowych kul zawieszonych jest na statywie tak, że ich punkty styczności i środki znajdują się na jednej prostej. Skrajna kula zostaje wychylona z położenia równowagi i puszczona swobodnie. Kula będąca w ruchu dociera do pierwszej kuli z grupy spoczywających - następuje zderzenie sprężyste. |
1. Czy obserwowany ruch związany jest z oddziaływaniem wszystkich pięciu kul?
2. Które zasady zachowania są spełnione?
3. Dlaczego wychyleniom od położenia równowagi ulegają tylko skrajne kule?
4. Czy wzory 3.10.1.1 i 3.10.1.2 można stosować w tym przypadku do stykających się tu kul?
Nie zapomnij przesłać odpowiedzi do swego opiekuna.
| Zderzenia sprężyste - mała kulka i duża kula | |
|---|---|
| lk |
Mała kulka i duża kula zawieszone są na statywie tak, że ich punkty styczności i środki znajdują się na jednej prostej. Mała kulka zostaje wychylona z położenia równowagi i puszczona swobodnie. Kulka dociera do dużej kuli i następuje zderzenie sprężyste. |
1. Czy obserwowany ruch związany jest z oddziaływaniem kul?
2. Które zasady zachowania są spełnione?
3. Dlaczego wychyleniom od położenia równowagi ulega tylko mała kulka?
4. Czy wzory 3.10.1.1 i 3.10.1.2 można stosować do pary tych kul?
5. Który z omówionych, różnych przypadków zderzeń sprężystych kul jest prezentowany?
6. Jeśli masz już odpowiedzi - nie zapomnij przesłać rozwiązań do swego opiekuna.
| Zderzenia niesprężyste - kulki plastelinowe | |
|---|---|
| |
Dwie plastelinowe kulki zawieszone są na statywie tak, że ich punkty styczności i środki znajdują się na jednej prostej. Jedna z kulek zostaje wychylona z położenia równowagi i puszczona swobodnie. Kulka ta dociera do drugiej spoczywającej kulki i następuje ich zderzenie niesprężyste. |
1. Czy obserwowany ruch związany jest z oddziaływaniem kul?
2. Która zasada zachowania jest spełniona?
3. Dlaczego po zderzeniu wychyleniom od położenia równowagi ulegają obie sklejone kulki?
4. Czy wzór 3.10.2.1 można stosować do pary tych kulek?
5. Jak jest pęd tych kulek w układzie środka masy?
6. Jeśli masz już odpowiedź - nie zapomnij przesłać rozwiązań do swego opiekuna.
11. Opis ruchu obrotowego
Opis ruchu obrotowego
Z ruchem obrotowym spotykamy się równie często jak z ruchem postępowym - zaczynając od otwierania drzwi, poprzez obracające się koła rowerów, samochodów czy pociągów, kręcące się wirniki silników elektrycznych, wirujące śmigła samolotów i helikopterów... aż po ruch planet i innych ciał niebieskich. Ruch obrotowy posiada szereg specyficznych cech zasługujących na uwagę i wyjaśnienie.
Powiedzieliśmy w lekcji trzeciej, że siły są przyczyną zmiany stanu ruchu ciał. Zmiana ta zależna jest nie tylko od samej wartości działającej siły, ale także od miejsca jej przyłożenia oraz kierunku jej działania. Rysunek 3.11.1 pokazuje cztery przykłady działania na drzwi tą samą siłą. W przypadkach \( A \) i \( D \) działająca siła nie spowoduje ruchu drzwi. W przypadku \( B \) potrzebne jest przyłożenie znacznej siły. Najłatwiej poruszyć drzwi przykładając siłę w pobliżu punktu \( C \) i tam właśnie instaluje się klamki.
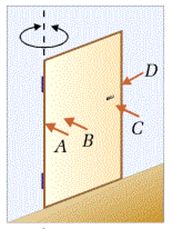
Rysunek 3.11.1. Skutek działania siły wywieranej na drzwi zależny jest od miejsca jej przyłożenia i kierunku jej działania.
{Na rysunku zostały przedstawione drzwi, których zawiasy znajdują się z lewej strony, a klamka z prawej. Drzwi mogą obracać się względem prostej zawierającej zawiasy w obie strony. Wektory A, B i C są prostopadłe do płaszczyzny drzwi i wszystkie znajdują się nieco poniżej klamki. Koniec wektor A znajduje się na lewej krawędzi drzwi, wektora C na prawej, a wektora B między A i C, bliżej A. Wektor D leży w tej samej płaszczyźnie co drzwi i jest skierowany prostopadle do prawej ich krawędzi. Jego koniec leży na tej krawędzi.}
Ten prosty przykład ilustruje specyficzne cechy ruchu obrotowego. Ruch odbywa się wokół określonej prostej, zwanej osią obrotu. Widzimy, że ważną rolę odgrywa odległość punktu przyłożenia siły od tej osi. Prędkość i przyspieszenie punktów poruszających się ruchem obrotowym też są zależne od odległości od osi obrotu, nie są więc jednakowe dla wszystkich punktów. Wspólny jest jednak kąt obrotu. Gdyby więc zamiast przemieszczenia liniowego rozważać przemieszczenie kątowe, opis byłby o wiele prostszy. Widać, że celowe jest wprowadzenie wielkości specyficznych dla ruchu obrotowego i dla nich formułowanie równań dynamiki.
Ruchem obrotowym bryły sztywnej nazywamy ruch, w którym wszystkie punkty bryły poruszają się po okręgach, których środki leżą na jednej prostej zwanej osią obrotu. Oś ta nie musi jednak zachowywać stałego położenia w czasie ruchu; może zmieniać swą orientację i może się przesuwać. Bardzo często mamy więc do czynienia z kombinacją ruchu postępowego i obrotowego. W lekcji trzeciej dowiedzieliśmy się, że ruch postępowy układu punktów materialnych możemy opisać zakładając, że wypadkowa wszystkich sił zewnętrznych działa na jeden punkt, którym jest środek masy układu. W czasie ruchu postępowego ciało może wykonywać także ruch obrotowy. Możemy jednak oddzielić ruch postępowy od obrotowego opisując ruch postępowy środka masy. Pozostaje wtedy tylko opis ruchu obrotowego.
Wyobraźmy sobie obracającą się tarczę. Prędkości różnych punktów tarczy są różne. Najszybciej poruszają się punkty na obwodzie tarczy, punkty położone bliżej osi poruszają się wolniej. Widzimy, że w opisie ruchu obrotowego pojęcie prędkości liniowej (2.3.1.1) należy zastąpić pojęciem prędkości kątowej jednakowej dla wszystkich punktów obracającego się ciała.
Położenie punktu materialnego poruszającego się po okręgu możemy określić poprzez kąt \( \varphi \), jaki zakreśla promień wodzący \( \vec{r} \) tego punktu. Kąt \( \varphi \) nazywamy drogą kątową.
Wartość prędkości kątowej równa jest pochodnej kąta zakreślanego przez promień wodzący względem czasu.
{Prędkość kątowa omega jest równa pochodnej kąta fi względem czasu t}
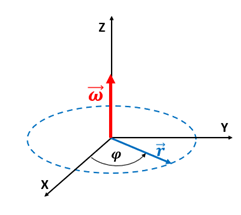
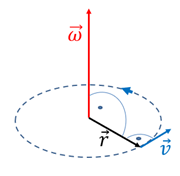
Rysunek 3.11.2. Określenie wektora prędkości kątowej
{Na rysunku przedstawiony jest prostokątny prawoskrętny układ współrzędnych X Y Z. Okrąg, po którym porusza się punkt materialny leży w płaszczyźnie X Y. Środek okręgu leży w początku układu współrzędnych. Kąt fi jest kątem jaki tworzy wektor położenia r z osią X układu współrzędnych. Wektor prędkości kątowej omega jest równoległy do osi Z i jego zwrot jest taki sam jak zwrot osi Z.}
Prędkość kątowa jest wektorem o kierunku pokrywającym się z osią obrotu. Zwrot wektora zgodny jest z regułą śruby prawoskrętnej. Przy zmianie kierunku ruchu obrotowego zwrot tego wektora zmieni się na przeciwny. Jednostką prędkości kątowej jest radian na sekundę (1 rad/s).
Ruch obrotowy ze stałą prędkością kątową opisuje się podając czas, w którym poruszające się ciało wykonuje jeden pełny obrót, czyli kiedy kąt obrotu wynosi \( 2 \pi \) {2 pi}. Czas ten, oznaczany jako T, nosi nazwę okresu w ruchu obrotowym. Liczbę obrotów wykonanych przez ciało w czasie jednej sekundy, czyli odwrotność okresu, nazywa się częstotliwością i oznacza zwykle jako \( v \) {ni} lub \( f \). Zapiszmy relacje pomiędzy tymi wielkościami.
{Prędkość kątowa omega jest równa ilorazowi 2 pi przez okres T}
{Częstotliwość ni jest odwrotnością okresu T}
{Prędkość kątowa omega jest równa iloczynowi 2 pi i częstotliwości ni}
Jednostką okresu jest sekunda (\( s \)), jednostką częstotliwości jest jeden herc (\( Hz \)); jego wymiarem jest odwrotność sekundy.
Kiedy prędkość kątowa zmienia się w czasie mówimy o ruchu obrotowym przyspieszonym. Przyspieszenie kątowe \( \vec{\varepsilon} \) {wektor epsilon}, które charakteryzuje zmianę prędkości kątowej w czasie, określamy jako pochodną prędkości kątowej względem czasu, czyli drugą pochodną drogi kątowej \( \varphi \) {fi} względem czasu
{Wektor przyspieszenia kątowego epsilonu jest równy pochodnej wektora prędkości kątowej omega względem czasu t i drugiej pochodnej drogi kątowej wektora fi}
gdzie (Rysunek 3.11.2)
{Wektor drogi kątowej fi jest równy iloczynowi wersora k i wartości drogi kątowej fi}
Kierunek i zwrot wektora przyspieszenia kątowego określony jest przez kierunek i zwrot zmiany prędkości kątowej.
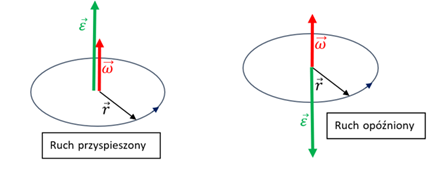
Rysunek 3.11.3. Zwrot przyspieszenia kątowego w przypadku stałej osi obrotu.
{Rysunek z lewej strony dotyczy ruchu przyspieszonego. Wektor epsilon ma taki sam kierunek i zwrot jak wektor omega. Rysunek z prawej strony dotyczy ruchu opóźnionego. Wektor epsilon ma taki sam kierunek jak omega, ale przeciwny zwrot}
Związek prędkości liniowej i kątowej
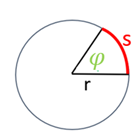
Rysunek 3.11.4. Związek między drogą liniową i kątową
{Okrąg o promieniu r. Kąt środkowy fi jest oparty na łuku o długości s}
Ponieważ (Rysunek 3.11.4):
{Długość łuku s jest równa iloczynowi promienia r i kąta środkowego fi}
stąd
{Wartość prędkości liniowej v jest równa pochodnej drogi liniowej s względem czasu, która jest równa iloczynowi r i pochodnej drogi kątowej fi względem czasu, który z kolei jest równy iloczynowi promienia r i wartości prędkości kątowej omega}
Powyższy związek można zapisać za pomocą wektorów:
{Wektor prędkości liniowej v jest iloczynem wektorowym wektora prędkości kątowej omega i wektora promienia r}
Prędkość liniowa jest iloczynem wektorowym prędkości kątowej i wektora położenia.
Rysunek 3.11.5. Związek między prędkością liniową i kątową.
{Wektory prędkości v, prędkości kątowej omega i promienia r są wzajemnie prostopadłe. Punkt materialny obiega okrąg w kierunku przeciwnym do ruchu wskazówek zegara. Wektor omega jest prostopadły do płaszczyzny okręgu i ma zwrot do góry. Wektor v jest styczny do okręgu. Wektor r ma początek w środku okręgu, a koniec w punkcie zaczepienia wektora prędkości v.}
Możemy wyrazić składową normalną wektora przyspieszenia przez prędkość kątową.
{Przyspieszenie normalne a_n jest równe ilorazowi drugiej potęgi prędkości liniowej v przez promień r, który możemy zapisać jako iloraz kwadratu iloczynu promienia r i prędkości kątowej omega przez promień r, co daje iloczyn promienia r i kwadratu prędkości kątowej omega}
gdzie \( r \) jest promieniem krzywizny toru.
Wartość przyspieszenia kątowego wiąże się ze składową styczną wektora przyspieszenia zależnością
{Przyspieszenie styczne a_s jest pochodną wartości prędkości liniowej v względem czasu, którą można zapisać jako pochodną iloczynu promienia r i prędkości kątowej omega względem czasu t. To z kolei można zapisać jako iloczyn promienia r i pochodnej prędkości kątowej omega względem czasu t, co daje iloczyn promienia r i wartości przyspieszenia kątowego epsilon}
przyjmujemy bowiem, że wartość \( r \) nie zmienia się w czasie.
Należy pamiętać, że powyższe relacje spełnione są przy założeniu, że ruch obrotowy zachodzi wokół ustalonej osi obrotu.
12. Moment siły i moment pędu
Moment siły i moment pędu
Wielkością, która dla ruchu obrotowego stanowi odpowiednik siły w ruchu postępowym, jest moment siły. Moment siły zdefiniowany jest zawsze względem określonego punktu w przestrzeni, choć w czasie ruchu położenie tego punktu może się zmieniać.
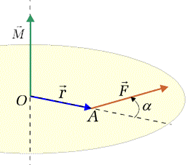
Rysunek 3.12.1. Moment siły.
{Fragment tarczy ustawionej prostopadle do płaszczyzny rysunku. Punkt O jest punktem środkowym tarczy; punkt A leży na tarczy. Wektor r jest wektorem o początku w punkcie O i końcu w punkcie A, ustawiony na godzinę czwartą. Wektor F jest zaczepiony w punkcie A, leży w płaszczyźnie tarczy i tworzy kąt alfa z przedłużeniem wektora r, kierunek i zwrot na godzinę drugą. Wektor M jest prostopadły do tarczy, zaczepiony w punkcie O i ma zwrot do góry}
Rozważmy punkt materialny \( A \), na który działa siła \( \vec{F} \). Na Rysunku 3.12.1 pokazany jest schemat geometryczny ilustrujący definicję momentu siły. Oczywiście, płaszczyzna, w której leżą wektory \( \vec{F} \) i \( \vec{r} \) może być dowolnie ułożona w przestrzeni.
Moment siły \( \vec{F} \) przyłożonej w punkcie \( A \), określony względem punktu \( O \), jest iloczynem wektorowym promienia wodzącego \( \vec{r} \) mającego początek w punkcie \( O \) i siły \( \vec{F} \).
{Wektor momentu siły M jest iloczynem wektorowym wektora promienia wodzącego r i wektora siły F}
Jest to jednocześnie moment siły \( \vec{F} \) względem osi, na której leży punkt \( O \), prostopadłej do płaszczyzny wyznaczonej przez wektory \( \vec{r} \) i \( \vec{F} \).
Na Rysunku 3.12.1. kolorem kremowym zaznaczona jest płaszczyzna wyznaczona przez wektory \( \vec{r} \) i \( \vec{F} \). Zgodnie z definicją iloczynu wektorowego, wektor momentu siły jest prostopadły do tej płaszczyzny. Zwrot tego wektora określony jest przez regułę śruby prawoskrętnej. Bezwzględna wartość momentu siły wynosi:
{Wartość momentu siły M jest równa iloczynowi wartości promienia r, siły F i sinusa kąta alfa}
Wartość momentu siły możemy wyrazić jako iloczyn siły przez składową promienia wodzącego prostopadłą do siły. Składową tę nazywamy ramieniem siły. Jest to odległość kierunku działania siły od osi obrotu.
{Wartość momentu siły M jest równa iloczynowi wartości promienia r, sinusa kąta alfa oraz wartości siły F, co można zapisać jako iloczyn ramienia siły i wartości siły F}
Możemy też wydzielić składową siły prostopadłą do promienia wodzącego. Wówczas wartość momentu siły możemy zapisać w postaci:
{Wartość momentu siły M jest równa iloczynowi wartości promienia r, wartości siły F oraz sinusa kąta alfa, co można zapisać jako iloczyn wartości promienia r i wartości składowej prostopadłej siły F}
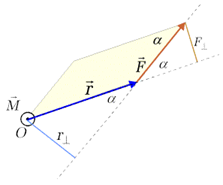
Rysunek 3.12.2. Rzut na płaszczyznę wyznaczoną przez wektor siły \( \vec{F} \) i promień wodzący \( \vec{r} \).
{Wektory promienia r i siły F leżą w jednej płaszczyźnie tworząc równoległobok. Wektor promienia r jest zaczepiony w punkcie O i wskazuje godzinę drugą. Koniec wektora promienia r jest jednocześnie początkiem wektora siły F wskazującego godzinę pierwszą. W punkcie O zaczepiony jest wektor momentu siły M prostopadły do płaszczyzny rysunku o zwrocie do nas. Odcinek prostopadły do prostej działania siły (prostej zawierającej wektor siły F) łączący punkt O z rzutem punktu O na prostą wyznaczoną przez wektor siły F nazywamy ramieniem siły. Odcinek łączący koniec wektora siły F z rzutem końca wektora siły F na prostą wyznaczoną przez wektor promienia r jest składową prostopadłą siły F. Wektor siły F tworzy z prostą wyznaczoną przez wektor promienia r kąt alfa. Wektor promienia r tworzy z prostą wyznaczoną przez wektor siły F również kąt alfa}
Widać, że wartość momentu siły określa składowa promienia wodzącego prostopadła do kierunku działania siły lub składowa siły prostopadła do promienia wodzącego. Kiedy kierunek siły pokrywa się z kierunkiem promienia wodzącego moment siły równy jest zeru. Kolorem kremowym na Rysunku 3.12.2 zaznaczony jest równoległobok oparty na wektorach \( \vec{r} \) i \( \vec{F} \). Pole tego równoległoboku równe jest wartości bezwzględnej momentu siły. Kierunek wektora momentu siły jest w tym przypadku prostopadły do ekranu, a zwrot jest w naszą stronę, co zaznaczamy symbolem \( \odot \) {kółko z kropką w środku}.
Składowa siły prostopadła do promienia wodzącego nadaje punktowi materialnemu o masie \( m \) przyspieszenie zgodne z kierunkiem ruchu punktu, znane nam z lekcji drugiej jako przyspieszenie styczne. Wykorzystując wzór (3.12.3) możemy więc napisać
{Wartość momentu siły M jest równa iloczynowi wartości promienia wodzącego r i wartości składowej prostopadłej siły F, który można zapisać jako iloczyn wartości promienia r, masy m, przyspieszenia stycznego a _s, co daje iloczyn promienia r i masy m pomnożony przez iloczyn promienia r i przyspieszenia kątowego epsilon. To z kolei można zapisać jako iloczyn masy m, drugiej potęgi promienia r i przyspieszenia kątowego epsilon. Ostatecznie zapisujemy jako iloczyn momentu bezwładności I oraz przyspieszenia kątowego epsilon}
Wprowadzona wielkość
{Moment bezwładności I jest równy iloczynowi masy m przez drugą potęgę promienia wodzącego r}
zwana momentem bezwładności punktu materialnego, odgrywa zasadniczą rolę w opisie ruchu obrotowego i będzie omawiana szczegółowo w dalszej części tej lekcji.
Podobnie jak wektor momentu siły określa się wektor momentu pędu względem osi obrotu (lub punktu \( O \)). Jest on równy iloczynowi wektorowemu promienia wodzącego i pędu punktu materialnego.
{Wektor momentu pędu L jest równy iloczynowi wektorowemu wektora promienia r i wektora pędu p, co z kolei jest równe iloczynowi wektorowemu wektora promienia r oraz iloczynu masy m i wektora prędkości v}
12.1. Równanie Newtona dla ruchu obrotowego
Równanie Newtona dla ruchu obrotowego
Wartość momentu pędu punktu materialnego poruszającego się po okręgu ze stałą prędkością kątową \( \vec{\omega} \) można wyrazić za pomocą wzoru:
{Wektor momentu pędu L jest równy iloczynowi momentu bezwładności I oraz wektora prędkości kątowej omega}
Wektor momentu pędu ma kierunek zgodny z kierunkiem osi obrotu podobnie jak wektor prędkości kątowej.
Przekształćmy teraz drugą zasadę dynamiki do postaci opisującej ruch obrotowy. Po pomnożeniu wektorowo obu stron równania (3.2.4.1) przez \( \vec{r} \) otrzymujemy równanie:
{Iloczyn wektorowy wektorów promienia r i siły F jest równy iloczynowi wektorowemu wektora promienia r i pochodnej wektora pędu p względem czasu t}
Lewa strona tego równania jest momentem siły. Dla znalezienia znaczenia fizycznego prawej strony obliczmy pochodną względem czasu momentu pędu.
{Pochodna wektora momentu pędu L względem czasu jest równa pochodnej względem czasu iloczynu wektorowego wektorów promienia r i pędu p, a to z kolei równa się sumie iloczynu wektorowego pochodnej wektora promienia r względem czasu t i wektora pędu p oraz iloczynu wektorowego wektora promienia r i pochodnej wektora pędu p względem czasu t.}
Zauważamy natychmiast, że pierwszy człon po prawej stronie tego wzoru równy jest zeru. Wynika to z własności iloczynu wektorowego. Pochodna wektora promienia wodzącego względem czasu, to z definicji wektor prędkości, którego kierunek pokrywa się z kierunkiem wektora pędu ciała, a iloczyn wektorowy dwóch wektorów równoległych jest równy zeru. W rezultacie otrzymujemy.
{Pochodna wektora momentu pędu L względem czasu t jest równa iloczynowi wektorowemu wektora promienia r i pochodnej wektora pędu p względem czasu t.}
Podstawiając ten związek do równania (3.12.1.2) i pamiętając w dalszym ciągu, że lewa strona równania (3.12.1.2) jest momentem siły (3.12.1) mamy
{Pochodna wektora momentu pędu L względem czasu jest równa wektorowi momentu siły M}
Wyraziliśmy w ten sposób druga zasadę dynamiki poprzez związek pomiędzy momentem siły i pochodną momentu pędu względem czasu. Związek ten jest zwany drugą zasadą dynamiki ruchu obrotowego.
Zakładając, że moment bezwładności zachowuje w czasie ruchu wartość stałą \( I=const \), możemy zapisać pochodną momentu pędu względem czasu w postaci
Pochodna wektora momentu pędu L względem czasu t jest równa pochodnej iloczynu momentu bezwładności I oraz wektora prędkości kątowej omega względem czasu t, która równa się iloczynowi momentu bezwładności I oraz pochodnej wektora prędkości kątowej omega względem czasu t, co możemy zapisać jako iloczyn momentu bezwładności I oraz wektora przyspieszenia kątowego epsilon}
Druga zasada dynamiki dla ruchu obrotowego może więc być zapisana także w postaci:
{Wektor momentu siły M jest równy iloczynowi momentu bezwładności I oraz wektora przyspieszenia kątowego epsilon}
13. Energia kinetyczna ruchu obrotowego
Energia kinetyczna ruchu obrotowego
Energia kinetyczna \( E_k \) punktu materialnego równa jest połowie iloczynu jego masy \( m \) przez kwadrat jego prędkości \( v \):
{Energia kinetyczna E_k jest równa połowie iloczynu masy m przez drugą potęgę prędkości v}
Energia kinetyczna posiada własność addytywności. Oznacza to, że energia kinetyczna układu \( N \) punktów materialnych równa jest sumie ich energii kinetycznych.
{Energia kinetyczna E_k jest równa sumie po i zmieniającym się od 1 do N energii kinetycznych E_k_i która jest równa sumie po i zmieniającym się od 1 do N z połowy iloczynu mas m_i przez kwadrat prędkości v_i}
Rozważmy ruch obrotowy układu sztywno związanych punktów materialnych. Typowym przykładem takiego układu jest ciało sztywne. Pamiętamy, że w ruchu obrotowym prędkość \( v_i \) poruszającego się punktu \( i \) zależna jest od jego odległości od osi obrotu \( r_i \), natomiast prędkość kątowa \( \omega \) jest dla wszystkich punktów taka sama. Prędkość liniowa punktu \( i \) wiąże się z prędkością kątową:
{Wartość prędkości v_i jest równa iloczynowi odległości od osi obrotu r_i oraz wartości prędkości kątowej omega}
Wykorzystamy te informacje zapisując wyrażenie dla energii kinetycznej układu punktów materialnych będących w ruchu obrotowym.
{Energia kinetyczna E_k jest równa sumie po i zmieniającym się od 1 do N z połowy iloczynu masy m_i przez kwadrat prędkości kątowej omega i kwadrat odległości od osi obrotu r_i. To z kolei jest równe połowie iloczynu kwadratu prędkości kątowej omega przez sumę po i zmieniającym się od 1 do N z iloczynu masy m_i przez kwadrat odległości od osi obrotu r_i.}
Rozpoznajemy tu wprowadzoną wzorem (3.12.6) wielkość \( I \) zwaną momentem bezwładności, która dla układu punktów materialnych określona jest wyrażeniem
{Moment bezwładności I równa się sumie po i zmieniającym się od 1 do N z iloczynu masy m_i oraz kwadratu odległości od osi obrotu r_i}
Zwróćmy uwagę, że moment bezwładności nie stanowi własności ciała, jak np. masa. W jego określeniu występuje bowiem kwadrat odległości od osi względem której następuje obrót, jest więc zależny od położenia w przestrzeni. Można powiedzieć, że moment bezwładności względem danej osi obrotu jest określany przez sposób przestrzennego rozłożenia masy względem tej osi w kierunku do niej prostopadłym.
Energię kinetyczną ruchu obrotowego sztywnego układu punktów materialnych wyrażamy więc wzorem
{Energia kinetyczna E_k jest równa połowie iloczynu momentu bezwładności I oraz kwadratu prędkości kątowej omega}
Wzór na energię kinetyczną w ruchu obrotowym ma podobną postać do wzoru (3.7.2.1), ale prędkość zastąpiła prędkość kątowa, a masę zastąpił moment bezwładności.
14. Moment bezwładności bryły sztywnej
Moment bezwładności bryły sztywnej
Ciało sztywne traktujemy jako układ nieskończenie wielu punktów materialnych, których wzajemne odległości pozostają niezmienione w czasie ruchu. Moment bezwładności dla ciała sztywnego wyznaczymy zastępując sumowanie we wzorze (3.13.5) całkowaniem po całej objętości ciała.
Przykładowe momenty bezwładności dla kilku typowych brył podano poniżej.
Tabela 3. Momenty bezwładności
|
Kula o promieniu R względem osi przechodzącej przechodzi przez środek |
Walec o masie m, promieniu R i wysokości h względem osi zawierającej wysokość walca |
Pręt o masie m i długości L względem osi przechodzącej przez jego środek i prostopadłej do niego |
|---|---|---|
|
\( I=\frac{2}{5}\cdot mR^2 \) {moment bezwładności I równy jest dwie piąte iloczynu masy m i kwadratu promienia R} |
\( I=\frac{1}{2}\cdot mR^2 \) {moment bezwładności I równy jest połowie
iloczynu masy m i kwadratu promienia R} |
\( I=\frac{1}{12}\cdot mL^2 \) {moment bezwładności I równy jest jednej
dwunastej iloczynu masy m i kwadratowi długości L} |
Zwróćmy uwagę, że o ile masa danego ciała określona jest jednoznacznie, to moment bezwładności jest różny dla różnych osi obrotu. Można pokazać, że jeśli znany jest moment bezwładności względem osi przechodzącej przez środek masy ciała \( I_{sm} \), to moment bezwładności względem osi do niej równoległej i przesuniętej o odcinek \( d \) (Rysunek 3.14.1) dany jest wzorem:
{Moment bezwładności I jest równy sumie momentu bezwładności I_s_m oraz iloczynu masy M przez kwadrat przesunięcia d}
Wzór ten nosi nazwę twierdzenia Steinera.
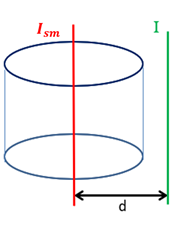
Rysunek 3.14.1. Twierdzenie Steinera
{Na rysunku przedstawiony został walec ustawiony pionowo oraz dwie równoległe linie proste. Jedna z nich zawiera wysokość walca i jest jego osią symetrii. Moment bezwładności względem niej został oznaczony I_s_m. Druga prosta znajduje się po prawej stronie walca, poza nim. Moment bezwładności względem niej został oznaczony I. Odległość między prostymi oznaczono przez d.}
Przykład
Trzy punkty materialne o masach \( m_1 \), \( m_2 \) i \( m_3 \) oraz kula o masie \( m_k \) i promieniu \( R_k \) są połączone ze sobą i z osią obrotu trzema jednorodnymi prętami, każdy o masie \( M \) i długościach odpowiednio \( l \), \( s \) i \( d \). Układ obraca się względem osi obrotu z prędkością kątową \( \omega_0 \) {omega 0} względem osi prostopadłej do płaszczyzny rysunku i przechodzącej przez punkt \( O \). Obliczyć moment bezwładności względem osi \( O \).
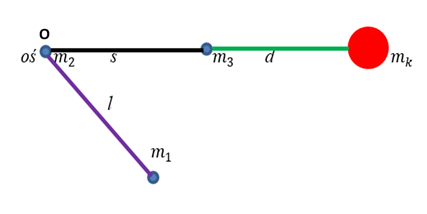
{Rysunek zawiera trzy punkty, trzy odcinki i kulę. Punkt O oznaczony jako m_2 i będący osią jest początkiem odcinka o długości s ustawionego na godzinę trzecią. Drugim końcem odcinka s jest punkt m 3. Punkt m_3 jest jednocześnie początkiem odcinka d, który leży przedłużeniu odcinka s. Na drugim końcu odcinka d znajduje się kula o masie m_k. Środek tej kuli oraz punkty m_3 i m_2 są współliniowe. Punkt O oznaczony jako m_2 jest również początkiem odcinka o długości l ustawionego na godzinę piątą. Drugim końcem odcinka l jest punkt m_1.}
Rozwiązanie:
Korzystamy z twierdzenia Steinera i wzorów podanych w Tabeli 3. Moment bezwładności układu jest sumą momentów bezwładności każdego z elementów układu.
Moment bezwładności kuli:
\( I_k=\frac{2}{5}m_k\cdot R_k^2+m_k{\cdot\left(d+s+R_k\right)}^2 \)
{Moment bezwładności I_k równa się sumie dwóm piątym iloczynu ułamka masy m_k przez kwadrat promienia R_k oraz iloczynu masy m_k przez kwadrat sumy długości d, długości s i promienia R_k}
Moment bezwładności punktów materialnych:
\( I_{pm}={m_1\cdot l^2+m}_2\cdot0^2+m_3\cdot s^2 \)
{Moment bezwładności I_p_m równa się sumie iloczynu masy m_1 i kwadratu długości l, iloczynu masy m_2 i zera oraz iloczynu masy m_3 przez kwadrat długości s}
Moment bezwładności prętów:
\( I_{pr}=\left[\frac{1}{12}M\cdot l^2+M\cdot\left(\frac{1}{2}l\right)^2\right]+\left[\frac{1}{12}M\cdot s^2+M{\cdot\left(\frac{1}{2}s\right)}^2\right]+\left[\frac{1}{12}M{\cdot d}^2+M\cdot\left(\frac{1}{2}d+s\right)^2\right] \)
{Moment bezwładności I_p_r równa się sumie jednej dwunastej iloczynu masy M przez kwadrat długości l , iloczynu masy M przez kwadrat połowy długości l, iloczynu masy M przez kwadrat długości s podzielonemu przez 12, iloczynu masy M przez kwadrat połowy długości s , iloczynu M przez kwadrat d podzielonemu przez 12 oraz iloczynu masy M przez kwadrat sumy połowy długości d i długości s}
Całkowity moment bezwładności układu:
\( I_u=I_k+I_{pm}+I_{pr} \)
{Moment bezwładności I_u równa się sumie momentu bezwładności I_k, momentu bezwładności I_p_m oraz momentu bezwładności I_p_r}
Domowe Laboratorium Fizyczne
Na zakończenie - proste doświadczenie w domowym laboratorium fizycznym. Najpierw zastanów się jaka będzie odpowiedź na zawarte poniżej pytania, potem zobacz demonstrację, następnie postaraj się poprzeć swe obserwacje rachunkowo.
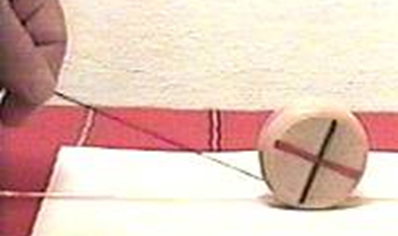
Rysunek 3.14.3. Szpulka z nitką
{Na ilustracji pokazana jest szpulka leżąca na podłodze, na którą nawinięta została nitka. Nitka wychodząca z dolnej części szpulki jest ustawiona na godzinę siódmą i ciągnięta przez narysowaną dłoń.}
Odpowiedz - gdy ciągniemy za nić nawiniętą na szpulce, jak to jest pokazane na powyższym rysunku, to czy nić będzie się:
1. nawijać - szpulka potoczy się w lewo,
2. odwijać - szpulka potoczy się w prawo,
3. ani nawijać, ani odwijać - szpulka przesunie się w lewo bez toczenia?
Od czego to będzie zależeć, np.: od masy szpulki, ilości nawiniętej na szpulce nici, kąta pomiędzy kierunkiem ciągniętej nici i płaszczyzną stołu, współczynnika tarcia szpulki o stół, od czegoś innego jeszcze...?
15. Zasada zachowania momentu pędu
Zasada zachowania momentu pędu
Drugą zasadę dynamiki dla ruchu obrotowego (3.12.1.7) można zapisać dla układu wielu ciał, jeśli moment siły zastąpimy wektorową sumą wszystkich zewnętrznych momentów sił działających na układ, a moment pędu oznaczać będzie całkowity moment pędu układu, czyli wektorową sumę momentów pędów poszczególnych ciał. W ten sposób uzyskujemy drugą zasadę dynamiki dla ruchu obrotowego układu wielu ciał:
{Wektor momentu siły M_zewn jest równy pochodnej wektora momentu pędu L względem czasu t}
Kiedy więc wypadkowy moment sił zewnętrznych działających na układ równy jest zeru, to pochodna momentu pędu względem czasu równa jest zeru, co oznacza, że moment pędu pozostaje stały. Jest to treścią kolejnego podstawowego prawa mechaniki - zasady zachowania momentu pędu.
Jeśli sztywny układ punktów materialnych lub ciało sztywne jest układem symetrycznym względem osi obrotu, to całkowity moment pędu będzie równoległy do osi obrotu i zgodny z kierunkiem wektora prędkości kątowej. Mamy wtedy
{Wektor momentu siły L jest równy iloczynowi momentu bezwładności I oraz wektora prędkości kątowej omega}
Jeśli na układ nie działają siły zewnętrzne lub moment sił zewnętrznych względem możliwej osi obrotu wynosi zero, to zgodnie z zasadą zachowania momentu pędu, całkowity moment pędu układu pozostaje niezmieniony. Z drugiej strony, moment pędu układów symetrycznych przy obrotach wokół osi symetrii, jest iloczynem momentu bezwładności ciała i jego prędkości kątowej. Jeśli więc zmienia się moment bezwładności ciała (bez wpływu sił zewnętrznych), to musi zmienić się także prędkość kątowa, by moment pędu pozostał niezmieniony. Kiedy łyżwiarz wykonujący piruet przyciąga do siebie ręce lub podnosi je do góry, zmniejsza wartość swojego momentu bezwładności względem osi obrotu, a w konsekwencji zwiększa się jego prędkość kątowa.
16. Pokazy z sali wykładowej Wydziału Fizyki PW
Poniżej przedstawiono pokazy prezentujące doświadczalne potwierdzenie zasady zachowania momentu pędu.
16.1. Hantle
Zobaczmy, jak zmiana momentu bezwładności układu wpływa na prędkość kątową, kiedy na układ nie działa zewnętrzny moment siły. Jeżeli moment bezwładności jest duży to prędkość kątowa mała. I odwrotnie, jeżeli moment bezwładności mały to prędkość kątowa jest duża.
a) b)
b) 
{Na fotografii z lewej strony dziewczyna siedzi na krześle obrotowym. W wyprostowanych wyciągniętych na boki pod kątem prostym do tułowia rękach trzyma jednakowe ciężarki. Na fotografii z prawej strony siedząca na obrotowym krześle dziewczyna nadal trzyma ciężarki, ale ręce ma przyciągnięte do tułowia.}
Dziewczyna rozpoczyna ruch wirowy trzymając w wyciągniętych rękach dwa ciężarki. Kiedy
przyciąga je do siebie, czyli zbliża do osi obrotu, moment bezwładności układu
zmniejsza się, a prędkość kątowa rośnie, bowiem: \( L_z=I\cdot\omega=const \){Składowa
momentu pędu L_z jest równa iloczynowi momentu bezwładności I i prędkości kątowej omega}.
Gdzie: \( L_z \)- składowa pionowa momentu pędu, \( I \) - moment bezwładności, \( \omega \) - prędkość kątowa. Kiedy dziewczyna prostuje ręce, czyli zwiększa moment bezwładności względem osi obrotu,
prędkość kątowa maleje.
16.2. Koło rowerowe
Koło rowerowe
Początkowo oś koła, a więc i wektor momentu pędu skierowane są poziomo. Składowa pionowa wektora momentu pędu równa jest zeru.
a)  b)
b) 
{Na fotografii z lewej strony mężczyzna siedzi na krześle obrotowym. W wyciągniętych do przodu pod kątem prostym do tułowia rękach trzyma metalową oś, na której zostało zamontowane koło mogące się swobodnie wokół niej obracać. Oś jest równoległa do podłogi, a koło jest do niej i do podłogi prostopadłe. Na fotografii z prawej strony siedzący na obrotowym krześle mężczyzna trzyma w wyciągniętych do przodu rękach oś koła, która jest prostopadła do podłogi, a koło jest równoległe do podłogi. Lewa ręka mężczyzny jest równoległa do podłogi i wskazuje godzinę dziewiątą, a prawa ręka wskazuje godzinę jedenastą}
Mężczyzna otrzymuje wirujące koło i następnie obraca oś wirującego koła do pionu. W czasie obracania osi koła moment pędu koła nie jest zachowany - mężczyzna musi wywierać znaczną siłę na obracaną oś, a także na oparcie krzesła. Moment siły reakcji więzów zmienia moment pędu koła - po obrocie moment pędu koła skierowany jest pionowo. Ponieważ jednak działające w czasie obracania siły były siłami wewnętrznymi (działającymi w układzie mężczyzna - krzesło), składowa pionowa całkowitego momentu pędu układu pozostaje równa zeru. Mężczyzna obraca się teraz wraz z wirującym kołem wokół osi pionowej w kierunku przeciwnym do kierunku obrotu koła, a wartość jego momentu pędu \( L_M \) jest równa wartości momentu pędu koła \( L_K \):
\( L_M=L_K \)
{Wartość momentu pędu L_M równa się wartości momentu pędu L_K}
Po zatrzymaniu mężczyzny moment jego pędu został przekazany Ziemi. Moment pędu koła nie zmienił się - nadal wynosi \( L_K \). Mężczyzna obraca oś koła o 1800. Moment pędu koła zmienia się z \( L_K \) na \( -L_K \). Aby całkowity moment pędu pozostał stały, mężczyzna kręci się teraz z momentem pędu \( L \), który spełnia równanie:
\( L_K=-L_K+L \)
{Moment pędu L_K równa się minus moment pędu L_K plus moment pędu L}
Wyznaczamy stąd \( L \):
\( L=2\cdot L_K \)
{Moment pędu L jest 2 razy większy od momentu pędu L K}
Moment pędu, a więc i prędkość kątowa mężczyzny jest dwa razy większa niż na początku.
17. Zadania
W kolejnych podrozdziałach znajdują się zadania z rozwiązaniami
17.1. Zadanie 1 (Zasady dynamiki Newtona)
Zadanie 1 (Zasady dynamiki Newtona)
Trzy ciała o masach \( m_1 \), \( m_2 \), \( m_3 \) połączone nieważkimi i nierozciągliwymi nićmi, przesuwają się po poziomej płaszczyźnie pod wpływem przyłożonej siły \( F \). Współczynnik tarcia między masami \( m_1 \), \( m_2 \), \( m_3 \) i podłożem wynosi µ {mi}. Należy znaleźć przyspieszenie mas \( a \) oraz siły napinające obie nici: \( N_1 \) i \( N_2 \).
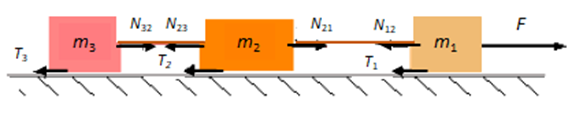
{Trzy klocki połączone nitkami leżą na poziomej powierzchni. Klocek o masie m_3 znajduje się z lewej strony, klocek o masie m_2 w środku, klocek o masie m_1 po prawej. Siła F równoległa do powierzchni została przyłożona do klocka o masie m_1 i ma zwrot w prawo. Na każdy klocek działa siła tarcia odpowiednio T_1, T_2, T_3. Siły tarcia mają zwrot w lewo.}
Rozwiązanie:
Napięta siłą \( N_1 \) nić działa na masy \( m_1 \) i \( m_2 \), znajdujące się na jej końcach, siłami \( N_{12} \) i \( N_{21} \) {siły N_1_2 i siły N_2_1}. Druga nić, napięta siłą \( N_2 \) działa na masy \( m_2 \) i \( m_3 \) siłami \( N_{23} \) i \( N_{32} \).
Na podstawie trzeciej zasady dynamiki Newtona:
\( \left|{\vec{N}}_1\right|=\left|{\vec{N}}_{12}\right|=\left|{\vec{N}}_{21}\right| \) oraz \( \left|{\vec{N}}_2\right|=\left|{\vec{N}}_{23}\right|=\left|{\vec{N}}_{32}\right| \)
{Wartość siły N_1 jest równa wartości siły N_1_2 i siły N_2_1. Wartość siły N_2 jest równa wartości siły N_2_3 i siły N_3_2.}
Ruch mas \( m_1 \), \( m_2 \), \( m_3 \) odbywa się pod wpływem przyłożonej siły \( F \) (zgodnie z zaznaczonym kierunkiem), z przyspieszeniem \( a \) i zgodnie z drugą zasadą dynamiki:
\( m_1\cdot a=F-T_1-N_1 \)
{Iloczyn masy m_1 i przyspieszenia a jest równy sile F minus siła tarcia T_1 minus siła N_1}
\( m_2\cdot a=N_1-T_2-N_2 \)
{Iloczyn masy m_2 i przyspieszenia a jest równy sile N_1 minus siła tarcia T_2 minus siła N_2}
\( m_3\cdot a=N_2-T_3 \)
{Iloczyn masy m_3 i przyspieszenia a jest równy różnicy siły N_2 i siły tarcia T_3}
Siły tarcia są proporcjonalne do sił nacisku, więc:
\( T_1=\mu\cdot m_1\cdot g \)
{Siła tarcia T_1 jest równa iloczynowi współczynnika tarcia mi, masy m_1, przyspieszenia ziemskiego g}
\( T_2=\mu\cdot m_2\cdot g \)
{Siła tarcia T_2 jest równa iloczynowi współczynnika tarcia mi, masy m_2, przyspieszenia ziemskiego g}
\( T_3=\mu\cdot m_3\cdot g \)
{Siła tarcia T_3 jest równa iloczynowi współczynnika tarcia mi, masy m_3, przyspieszenia ziemskiego g}
Odpowiedź otrzymamy rozwiązując układ równań.
17.2. Zadanie 2 (Ruch postępowy po równi pochyłej)
Zadanie 2 (Ruch postępowy po równi pochyłej)
Współczynnik tarcia między ciałem o masie \( m \) i równią wynosi \( µ \). Kąt nachylenia równi \( \alpha \). Z jakim przyspieszeniem porusza się masa \( m \):
a) w dół równi?
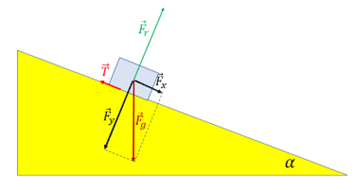
{Do klocka znajdującego się na równi przyłożone są siły. Siła ciężkości F_g skierowana jest pionowo w dół. Składowa siły ciężkości F_x jest równoległa do równi i skierowana w dół równi. Składowa siły ciężkości F_y jest prostopadła do równi i wskazuje godzinę siódmą. Siły F_x i F_y tworzą prostokąt, którego siła ciężkości F_g jest przekątną. Siła tarcia T jest równoległa do równi i skierowana w górę równi. Siła reakcji F_r jest prostopadła do równi, ma taką samą długość jak składowa siły ciężkości F_y, ale przeciwny zwrot wskazując godzinę pierwszą}
b) w górę równi?
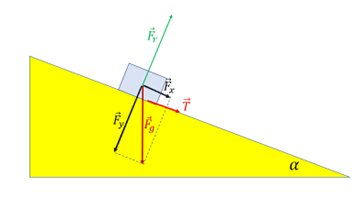
{Do klocka znajdującego się na równi przyłożone są siły. Siła ciężkości F_g skierowana jest pionowo w dół. Składowa siły ciężkości F_x jest równoległa do równi i skierowana w dół równi. Składowa siły ciężkości F_y jest prostopadła do równi i wskazuje godzinę siódmą. Siły F_x i F_y tworzą prostokąt, którego siła ciężkości F_g jest przekątną. Siła tarcia T jest równoległa do równi i skierowana w dół równi. Siła reakcji F_r jest prostopadła do równi, ma taką samą długość jak siła F_y, ale przeciwny zwrot wskazując godzinę pierwszą}
Rozwiązanie:
a) Siłę ciężkości \( \vec{F_g} \) rozkładamy na składowe: równoległą do równi \( \vec{F_x} \) i prostopadłą do równi \( \vec{F_y} \).
\( F_x=F_gsin\alpha=mgsin\alpha \)
{Siła F_x jest równa iloczynowi siły ciężkości F_g i sinusa kąta alfa, który jest równy iloczynowi masy m, przyspieszenia ziemskiego g i sinusa kąta alfa}
\( F_y=F_gcos\alpha=mgcos\alpha \)
{Siła F_y jest równa iloczynowi siły ciężkości F_g i cosinusa kąta alfa, który jest równy iloczynowi masy m, przyspieszenia ziemskiego g i cosinusa kąta alfa}
Siła sprężystości podłoża (siła reakcji) \( \vec{F_r} \) jest równa sile nacisku i w tym przypadku jest równa \( F_y \).
Równanie ruchu Newtona:
\( m\cdot a=m\cdot g\cdot s i n{\alpha}-T \)
{Iloczyn masy m i przyspieszenia a jest równy iloczynowi masy m, przyspieszenia ziemskiego g i sinusa kąta alfa minus siła tarcia T}
\( T=\mu\cdot m\cdot g\cdot c o s{\alpha} \)
{Siła tarcia T jest równa iloczynowi współczynnika tarcia mi, masy m, przyspieszenia g i cosinusa kąta alfa}
Stąd otrzymujemy:
\( a=g\cdot\left(sin{\alpha}-\mu\cdot c o s{\alpha}\right) \)
{Przyspieszenie a równa się iloczynowi przyspieszenia ziemskiego g przez różnicę sinusa kąta alfa i iloczynu współczynnika tarcia mi przez cosinus kąta alfa}
\( a>0 \), gdy \( \mu < tg\alpha \)
{kąt alfa jest większy od zera, gdy współczynnik tarcia mi jest mniejszy od tangensa kąta alfa}
\( a<0 \), gdy \( \mu > tg\alpha \)
{kąt alfa jest mniejszy od zera, gdy współczynnik tarcia mi jest większy od tangensa kąta alfa}
Masa \( m \) porusza się w dół równi z przyspieszeniem \( a \). Gdy \( tg\alpha>µ \) {tangens alfa jest większy od współczynnika tarcia mi} to jej prędkość rośnie, gdy \( tg\alpha<µ \) to prędkość maleje.
b) Równanie ruchu Newtona:
\( m\cdot a=m\cdot g\cdot s i n{\alpha}+T \)
{Iloczyn masy m i przyspieszenia a jest równy sumie iloczynu masy m, przyspieszenia ziemskiego g i sinusa kąta alfa plus siła tarcia T}
gdzie
\( T=\mu\cdot m\cdot g\cdot c o s{\alpha} \)
{Siła tarcia T jest równa iloczynowi współczynnik tarcia mi, masy m, przyspieszenia ziemskiego g i cosinusa kąta alfa}
Stąd otrzymujemy:
\( a=g\cdot\left(sin{\alpha}+\mu\cdot c o s{\alpha}\right) \)
{Przyspieszenie a równa się iloczynowi przyspieszenia ziemskiego g przez sumę sinusa kąta alfa oraz iloczynu współczynnika tarcia mi i cosinusa kąta alfa}
Masa \( m \) porusza się w górę równi z opóźnieniem a, jej prędkość maleje.
17.3. Zadanie 3 (Tarcie - równia pochyła)
Zadanie 3 (Tarcie - równia pochyła)
Na równi pochyłej o długości \( L \) i kącie nachylenia \( \alpha = {30}^o \) znajduje się klocek o masie \( M \). Do klocka została przyłożona siła \( \vec{F_0} \) równoległa do równi. Klocek porusza się w dół równi ze stałą prędkością.
a) Narysuj wszystkie siły działające na klocek.
b) Znajdź współczynnik tarcia klocka o równię.
{Na równi znajduje się klocek, do którego przyłożona jest siła F_0. Siła jest równoległa do równi i skierowana w dół}
Rozwiązanie:
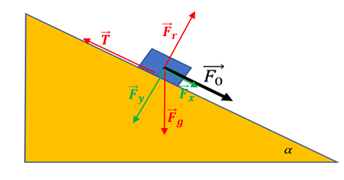
{Do klocka znajdującego się na równi przyłożone są siły. Siła ciężkości F_g skierowana jest pionowo w dół. Składowa siły ciężkości F_x jest równoległa do równi i skierowana w dół równi. Składowa siły ciężkości F_y jest prostopadła do równi i wskazuje godzinę siódmą. F_x i F_y tworzą prostokąt, którego siła ciężkości F_g jest przekątną. Siła tarcia T jest równoległa do równi i skierowana w górę równi. Siła reakcji F_r jest prostopadła do równi, ma taką samą długość jak siła F_y, ale przeciwny zwrot wskazując godzinę pierwszą. Siła F_0 jest równoległa do równi i skierowana w dół}
\( \vec{F_r} \) – siła sprężystości podłoża (siła reakcji)
\( \vec{T} \) – siła tarcia
\( \vec{F_g} \) – siła ciężkości
\( \vec{F_x} \) - składowa siły ciężkości równoległa do równi
\( \vec{F_y} \) - składowa siły ciężkości prostopadła do równi
Rozkładamy siłę ciężkości na składowe:
\( F_x=F_gsinα=Mgsin30°= \frac{1}{2}Mg \)
{Składowa siły ciężkości F_x jest równa iloczynowi siły ciężkości F_g i sinusa kąta alfa, który jest równy iloczynowi masy M, przyspieszenia ziemskiego g i sinusa 30 stopni, a to jest równe połowie iloczynu masy M i przyspieszenia ziemskiego g}
\( F_y=F_gcosα=Mgcos30°= \frac{\sqrt{3}}{2}Mg \)
{Składowa siły ciężkości F_y jest równa iloczynowi siły ciężkości F_g i cosinusa kąta alfa, który jest równy iloczynowi masy M, przyspieszenia ziemskiego g i cosinusa 30 stopni, a to jest równe połowie iloczynu pierwiastka z 3, masy M i przyspieszenia ziemskiego g}
Ponieważ klocek porusza się ze stałą prędkością, to z I zasady dynamiki wynika, że wypadkowa siła działająca na klocek jest równa zeru, czyli wszystkie siły równoważą się.
W kierunku prostopadłym do równi:
\( {\vec{F}}_r+{\vec{F}}_y=0 \)
{Suma wektora siły reakcji F_r i wektora składowej siły ciężkości F_y jest równa zeru}
W kierunku równoległym do równi:
\( \vec{T}+{\vec{F}}_0+{\vec{F}}_x=0 \)
{Suma wektorów siły tarcia T, siły F_0 i składowej siły ciężkości F_x jest równa zeru}
Siła tarcia ma przeciwny zwrot do sił \( \vec{F_0} \) i \( \vec{F_x} \), więc:
\( T=F_0+F_x \)
{Siła tarcia T jest równe sumie siły F_0 i siły F_x}
Ponieważ siła tarcia wyraża się wzorem:
\( T={\mu F}_y \)
{Siła tarcia T jest równa iloczynowi współczynnika tarcia mi i siły F_y}
Stąd
\( {\mu F}_y=F_0+F_x \)
{iloczyn współczynnika tarcia mi i siły F_y jest równy sumie siły F_0 i siły F_x}
Podstawiając obliczone wcześniej \( F_x \) i \( F_y \):
\( \mu\frac{\sqrt{3}}{2}Mg=F_0+\frac{1}{2}Mg \)
{Połowa iloczynu pierwiastka z 3, masy M, przyspieszenia ziemskiego g i współczynnika tarcia mi jest równa sumie siły F_0 i połowy iloczynu masy M i przyspieszenia ziemskiego g}
Ostatecznie
\( \mu=\frac{2F_0+Mg}{\sqrt3Mg} \)
{współczynnik tarcia mi jest równy ilorazowi sumy podwojonej siły F_0 i iloczynu masy M i przyspieszenia ziemskiego g przez iloczyn pierwiastka z 3, masy M i przyspieszenia ziemskiego g}
17.4. Zadanie 4 (Maszyna Atwooda, czyli bloczek nieruchomy)
Zadanie 4 (Maszyna Atwooda, czyli bloczek nieruchomy)
Dwa ciała o masach \( m_1 \) i \( m_2 \) połączone są nieważką, nierozciągliwą nicią przerzuconą przez bloczek, którego masę należy zaniedbać. Bloczek obraca się w kierunku zgodnym z kierunkiem ruchu wskazówek zegara. Należy obliczyć:
a) przyspieszenie mas \( a \)
b) naciąg nici \( N \)
c) znaleźć warunek jaki musi spełniać masa \( m_2 \), aby ruch odbywał się w podanym kierunku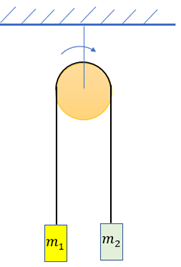
{Na nieruchomym bloczku zawieszone są dwa klocki. Po lewej stronie znajduje się klocek o masie m_1, po prawej stronie wisi klocek o masie m_2. Bloczek obraca się zgodnie z ruchem wskazówek zegara.}
Rozwiązanie:
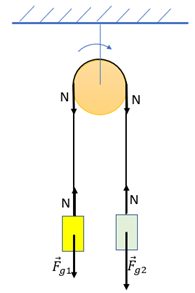
{Na nieruchomym bloczku zawieszone są dwa klocki. Po lewej stronie znajduje się klocek o masie m_1, po prawej stronie wisi klocek o masie m_2. Bloczek obraca się zgodnie z ruchem wskazówek zegara. Do klocka m_1 przyłożona jest siła F_g_1 wskazująca godzinę szóstą oraz siła N wskazująca godzinę dwunastą. Do klocka m_2 przyłożona jest siła F_g_2 wskazująca godzinę szóstą oraz siła N wzdłuż nici wskazująca godzinę dwunastą. Po obu stronach bloczka przyłożone są siły N wskazujące godzinę szóstą działające wzdłuż nici.}
Bloczek o zaniedbywalnej masie służy do „przeniesienia” siły naciągu nici. Ponieważ bloczek obraca się zgodnie z ruchem wskazówek zegara, to oznacza, że klocek \( m_1 \) porusza się do góry, a klocek \( m_2 \) w dół. Z drugiej zasady dynamiki Newtona, równania ruchu postępowego mas:
\( m_1\cdot a=N-m_1\cdot g \)
{Iloczyn masy m_1 i przyspieszenia a jest równy różnicy siły N oraz iloczynu masy m_1 i przyspieszenia ziemskiego g}
\( m_2\cdot a=m_2\cdot g-N \)
{Iloczyn masy m_2 i przyspieszenia a jest równy różnicy iloczynu masy m_2 i przyspieszenia ziemskiego g oraz siły N}
gdzie umownie, dodatni zwrot mają wektory skierowane zgodnie z kierunkiem wynikającym z obrotów bloczka. Rozwiązując ten układ równań otrzymujemy przyspieszenie \( a \) oraz naciąg nici \( N \). Ruch mas odbywa się we wskazanym strzałką kierunku, gdy \( a\geq0 \). {Przyspieszenie a jest większe lub równe zeru}
17.5. Zadanie 5 (układ mas w ruchu)
Zadanie 5 (układ mas w ruchu)
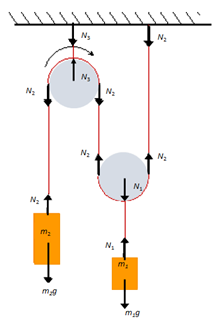
{Na nitce przerzuconej przez nieruchomy bloczek został po lewej stronie klocek o masie m_2. Po prawej stronie znajduje się ruchomy bloczek, do którego został zaczepiony klocek o masie m 1. Na każdy z klocków działa siła ciężkości skierowana pionowo w dół: na lewy działa siła o wartości m_2 g, a na prawy m_1 g. Na klocek m_2 działa sił wzdłuż nitki do góry N_2. Na klocek m_1 działa pionowo do góry siła N_1. Na nieruchomy bloczek działa pionowo do góry siła N_3, a na ruchoma siła N_1 w dół. Po obu stronach nieruchomego bloczka wzdłuż nitki działają w dół siły N_2. Po obu stronach ruchomego bloczka wzdłuż nitki działają w górę siły N_2}
Układ mas przedstawiony na rysunku jest w ruchu. Należy obliczyć:
a) przyspieszenia mas \( a_1 \) oraz \( a_2 \), dla masy \( m_1 \) i \( m_2 \),
b) naciągi nici \( N_1 \), \( N_2 \) i \( N_3 \).
Masy bloczków oraz nierozciągliwej nici zaniedbać, tarcie również.
Rozwiązanie:
Otrzymujemy układ równań ruchu dla masy \( m_1 \) i \( m_2 \), odpowiednio\( m_1\cdot a_1=m_1\cdot g - N_1 \)
{Iloczyn masy m_1 i przyspieszenia a jest równy różnicy iloczynu masy m_1 i przyspieszenia ziemskiego g oraz siły N_1}
\( m_2\cdot a_2=N_2-m_2\cdot g \)
{Iloczyn masy m_2 i przyspieszenia a jest równy różnicy siły N_2 oraz iloczynu masy m_2 i przyspieszenia ziemskiego g}
Związek między przyspieszeniami
\( | \frac{a_1}{a_2} |= \frac{1}{2} \)
{Wartość bezwzględna ze stosunku przyspieszenia a_1 do przyspieszenia a_2 jest równa jednej drugiej}
wynikający z zależności kinematycznych oraz zależności między siłami naciągu nici:
\( N_1=2\cdot N_2 \)
{Siła N_1 jest równa podwojonej sile N_2}
\( N_3=2\cdot N_2 \)
{Siła N_3 jest równa podwojonej sile N_2}
17.6. Zadanie 6 (warunek określonego ruchu)
Zadanie 6 (warunek określonego ruchu)
Dwa ciała o masach \( m_1 \) i \( m_2 \) połączono nicią, która przerzucona jest przez bloczek znajdujący się w wierzchołku równi pochyłej o kącie nachylenia α. Współczynnik tarcia między ciałem o masie \( m_2 \) i równią wynosi \( \mu \). Masę bloczka należy zaniedbać.
Jaka powinna być masa \( m_1 \), aby ciało o masie \( m_2 \) poruszało się ruchem jednostajnie przyspieszonym:
a) w górę równi,
b) w dół równi.
Rozwiązanie:
a) Masa \( m_2 \) porusza się w górę równi
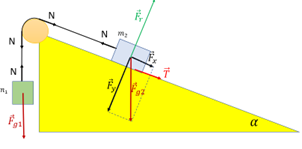
{Na wierzchołku równi o kącie nachylenia alfa zamontowany jest bloczek. Do prawego końca nitki przerzuconej przez bloczek doczepiono klocek m 2, a do lewego klocek m 1, który wisi. Do klocka m_1 zaczepiona jest siła F_g_1 skierowana pionowo w dół. Wzdłuż nitki działają siły N. Do klocka o masie m_2 znajdującego się na równi przyłożone są siły. Siła ciężkości F_g_2 skierowana jest pionowo w dół. Składowa siły ciężkości F_x jest równoległa do równi i skierowana w dół równi. Składowa siły ciężkości F_y jest prostopadła do równi i wskazuje godzinę siódmą. Siły F_x i F_y tworzą prostokąt, którego siła ciężkości F_g_2 jest przekątną. Siła tarcia T jest równoległa do równi i skierowana w dół równi. Siła reakcji F_r jest prostopadła do równi, ma taką samą długość jak F_y, ale przeciwny zwrot wskazując godzinę pierwszą.}
a) Siłę ciężkości \( \vec{F_{g2}} \) rozkładamy na składowe: równoległą do równi \( \vec{F_{x}} \) i prostopadłą do równi \( \vec{F_{y}} \).
\( F_x=F_{g2}sin\alpha=m_2gsin\alpha \)
{Składowa siły ciężkości F_x jest równa iloczynowi siły ciężkości F_g_2 i sinusa kąta alfa, który jest równy iloczynowi masy m_2, przyspieszenia ziemskiego g i sinusa kąta alfa}
\( F_y=F_{g2}cos\alpha=m_2gcos\alpha \)
{Składowa siły ciężkości F_y jest równa iloczynowi siły F_g_2 i cosinusa kąta alfa, który jest równy iloczynowi masy m_2, przyspieszenia ziemskiego g i cosinusa kąta alfa}
Siła sprężystości podłoża (siła reakcji) \( \vec{F_r} \) jest równa sile nacisku i w tym przypadku jest równa \( \vec{F_y} \).
Równania ruchu Newtona:
\( m_1\cdot a=m_1\cdot g-N \)
{Iloczyn masy m_1 i przyspieszenia a jest równy różnicy iloczynu masy m_1 i przyspieszenia ziemskiego g oraz siły N}
\( m_2\cdot a=N-m_2\cdot g\cdot s i n{\alpha}-m_2\cdot g\cdot\mu\cdot c o s{\alpha} \)
{Iloczyn masy m_2 i przyspieszenia a jest równy sile N minus iloczyn masy m_2, przyspieszenia ziemskiego g i sinusa kąta alfa i minus iloczyn masy m_2, przyspieszenia ziemskiego g, współczynnika tarcia mi i cosinusa kąta alfa}
stąd
\( a=\frac{m_1-m_2\cdot\left(sin{\alpha}+\mu\cdot c o s{\alpha}\right)}{m_1+m_2}\cdot g \)
{Przyspieszenie a równa się g pomnożonemu przez ułamek, którego licznik jest różnicą masy m_1 oraz iloczynu masy m_2 przez sumę sinusa kąta alfa i pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa. Mianownikiem ułamka jest suma masy m_1 i masy m_2}
Z warunku ruchu, \( a > 0 \) {przyspieszenie a jest większe od zera}, otrzymujemy zależność:
\( m_1>m_2\cdot\left(sin{\alpha}+\mu\cdot c o s{\alpha}\right) \)
{Masa m_1 jest większa od iloczynu masy m_2 oraz sumy sinusa kąta alfa i pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa}
b) Masa m2 porusza się w dół równi
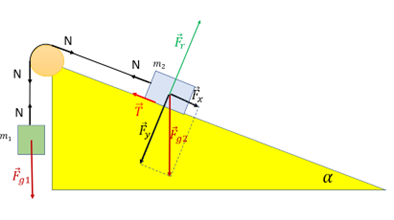
{Na wierzchołku równi zamontowany jest bloczek. Do prawego końca nitki przerzuconej przez bloczek doczepiono klocek m_2, a do lewego klocek m_1, który wisi. Do klocka m_1 zaczepiona jest siła F_g_1 skierowana pionowo w dół. Wzdłuż nitki działają siły N. Do klocka o masie m_2 znajdującego się na równi przyłożone są siły. Siła F_g_2 skierowana jest pionowo w dół. Składowa siły ciężkości F_x jest równoległa do równi i skierowana w dół równi. Składowa siły ciężkości F_y jest prostopadła do równi i wskazuje godzinę siódmą. F_x i F_y tworzą prostokąt, którego siła ciężkości F g 2 jest przekątną. Siła tarcia T jest równoległa do równi i skierowana w górę równi. Siła F_r jest prostopadła do równi, ma taką samą długość jak F_y, ale przeciwny zwrot wskazując godzinę pierwszą.}
{Przyspieszenie a równa się przyspieszeniu ziemskiemu g pomnożonemu przez ułamek, którego licznik jest różnicą masy m_1 oraz iloczynu masy m_2 przez sumę sinusa kąta alfa i pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa. Mianownikiem ułamka jest suma masy m_1 i masy m _2.}Równania ruchu Newtona:
\( m_1 \cdot a = N - m_1 \cdot g \)
{Iloczyn masy m_1 i przyspieszenia a jest równy różnicy siły N oraz iloczynu masy m_1 i przyspieszenia ziemskiego g.}
\( m_2 \cdot a = m_2 \cdot g \cdot sin \alpha-N-m_2 \cdot g \cdot \mu \cdot cos \alpha \)
{Iloczyn masy m_2 i przyspieszenia a jest równy iloczynowi masy m_2, przyspieszenia ziemskiego g i sinusa kąta alfa minus siła N i minus iloczyn masy m_2, przyspieszenia ziemskiego g, współczynnika tarcia mi i cosinusa kąta alfa}
Stąd
\( a=\frac{m_1-m_2\cdot\left(sin{\alpha}+\mu\cdot c o s{\alpha}\right)}{m_1+m_2}\cdot g \)
{Przyspieszenie a równa się przyspieszeniu ziemskiemu g pomnożonemu przez ułamek, którego licznik jest różnicą iloczynu masy m_2 przez różnicę sinusa kąta alfa i pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa oraz masy m_1. Mianownikiem ułamka jest suma masy m_1 i masy m_2}
Z warunku ruchu, \( a > 0 \) {przyspieszenie a jest większe od zera}, otrzymujemy zależność:
\( m_1 \lt m_2\cdot\left(sin{\alpha}-\mu\cdot c o s{\alpha}\right) \)
{Masa m_1 jest mniejsza od iloczynu masy m_2 przez różnicę sinusa kąta alfa i pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa}
oraz
\( \mu < tan \alpha \)
{Współczynnik tarcia mi jest mniejszy od tangensa kąta alfa}
17.7. Zadanie 7 (zasada zachowania pędu i energii)
Zadanie 7 (zasada zachowania pędu i energii)
Z wózka o masie \( M \), jadącego z prędkością \( v \) po gładkim, poziomym torze wyrzucono piłkę o masie \( m \) z prędkością \( u \) względem wózka. Obliczyć prędkość wózka po wyrzuceniu piłki oraz pracę wyrzucenia piłki z wózka.
Zadanie należy rozwiązać uwzględniając dwa przypadki:
a) piłka została wyrzucona zgodnie z kierunkiem ruchu wózka
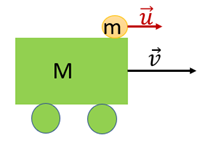
{Wózek porusza się w prawo. Wektor prędkości v i wektor prędkości u wskazują godzinę trzecią.}
b) piłka została wyrzucona w kierunku przeciwnym do kierunku ruchu wózka.
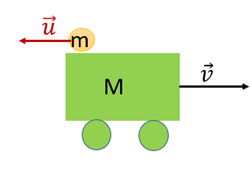
{Wózek porusza się w prawo. Wektor prędkości v wskazuje godzinę trzecią, a wektor prędkości u godzinę dziewiątą}
Rozwiązanie:
Korzystając z zasady zachowania pędu
\( \left(m+M\right)\cdot\vec{v}=M\cdot{\vec{v}}_k+m\cdot\left(\vec{v}+\vec{u}\right) \)
{Iloczyn wektora prędkości v przez sumę masy piłki m i masy wózka duże M jest równy sumie iloczynu masy wózka duże M przez wektor prędkości v_k oraz iloczynu masy piłki m przez sumę wektorów prędkości v i prędkości u}
otrzymujemy prędkość wózka po wyrzuceniu worka w przypadku a)
\( v_k=v-\frac{m\cdot u}{M} \)
{Prędkość v_k równa się różnicy prędkości v i iloczynu masy piłki m przez u podzielonemu przez masę wózka duże M}
W przypadku b) prędkość wózka
\( v_k=v+\frac{m\cdot u}{M} \)
{Prędkość v_k równa się sumie prędkości v oraz iloczynu masy piłki m i prędkości u podzielonemu przez masę wózka duże M}
Praca \( W \) wykonana przez człowieka zwiększy energię kinetyczną układu mas M oraz m
\( W=∆E \)
{Praca W równa się delta energii E}
Zmiana energii kinetycznej układu równa jest różnicy energii końcowej \( M \) i początkowej \( m \),
\( ∆E=Ek-E_0 \)
{zmiana energii delta E równa się różnicy energii kinetycznej końcowej E_k i energii kinetycznej początkowej E_0}
Dlatego dla przypadku a)
\( W=\frac{M\cdot v_k^2}{2}+\frac{m\cdot\left(v+u\right)^2}{2}-\frac{\left(M+m\right)\cdot v^2}{2}=\frac{m\cdot u^2}{2}\left(1+\frac{m}{M}\right) \)
{Praca W równa się połowie iloczynu masy wózka duże M przez kwadrat prędkości v_k plus połowa iloczynu masy piłki m przez kwadrat sumy prędkości v i prędkości u minus połowa iloczynu sumy mas wózka i piłki przez kwadrat prędkości v, co daje połowę iloczynu masy piłki m i kwadratu prędkości u pomnożony przez sumę 1 i ilorazu masy piłki m przez masę wózka duże M}
Dla przypadku b)
\( W=\frac{M\cdot v_k^2}{2}+\frac{m\cdot\left(v-u\right)^2}{2}-\frac{\left(M+m\right)\cdot v^2}{2} \)
{Praca W równa się połowie iloczynu masy wózka duże M przez kwadrat prędkości v_k plus połowa iloczynu masy piłki m przez kwadrat różnicy prędkości v i prędkości u minus połowa iloczynu sumy mas wózka i piłki przez kwadrat prędkości v}
17.8. Zadanie 8 (energia i praca)
Zadanie 8 (energia i praca)
Z jakim przyspieszeniem porusza się masa \( m \):
a) swobodnie w dół równi,
b) w górę równi?
Współczynnik tarcia między ciałem o masie \( m \) i równią wynosi \( \mu \) {mi} oraz \( tg\alpha>µ \) {tangens kąta alfa jest większy od współczynnika tarcia mi}. Przy rozwiązywaniu tego zadania należy zastosować zasadę zachowania energii.
Rozwiązanie:
a) Masa \( m \) porusza się w dół równi z przyspieszeniem a, jej energia kinetyczna wzrasta, energia potencjalna maleje. Bilans energii uzupełnia praca siły tarcia.
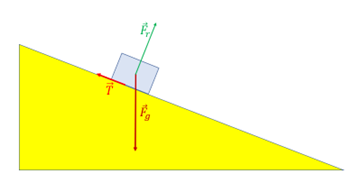
{Na równi leży ciało o masie m. Na masę działają 3 siły. Siła ciężkości F_g jest skierowana pionowo w dół, siła reakcji F_r jest skierowana prostopadle do równi w górę. Siła tarcia T jest równoległa do równi i ma zwrot do góry równi, przeciwnie do ruchu masy.}
Zasada zachowania energii:
\( m\cdot g\cdot h=\frac{m\cdot v^2}{2}+W \)
{Iloczyn masy m, przyspieszenia ziemskiego g i wysokości h jest równy sumie połowy iloczynu masy m przez kwadrat prędkości v oraz pracy W}
gdzie \( W \) - to praca siły tarcia \( T \) na drodze \( s \), \( h \) - to wysokość mierzona od podstawy równi
\( T=\mu\cdot m\cdot g\cdot c o s{\alpha} \)
{Siła tarcia T jest równa iloczynowi współczynnika tarcia mi, masy m, przyspieszenia ziemskiego g i cosinusa kąta alfa}
Po podstawieniu otrzymujemy
\( m\cdot g\cdot s\cdot s i n{\alpha}=\frac{m\cdot v^2}{2}+\mu\cdot m\cdot g\cdot s\cdot c o s{\alpha} \)
{Iloczyn masy m, przyspieszenia ziemskiego g, drogi s i sinusa kąta alfa jest równy połowie iloczynu masy m przez kwadrat prędkości v plus iloczyn współczynnika tarcia mi, masy m, przyspieszenia ziemskiego g, drogi s i cosinusa kąta alfa}
czyli \( v=\sqrt{2\cdot g\cdot s\cdot\left(sin{\alpha}-\mu\cdot c o s{\alpha}\right)} \)
{prędkość v jest równa pierwiastkowi z podwojonego iloczynu przyspieszenia ziemskiego g, drogi s i różnicy sinusa kąta alfa oraz pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa}
Stąd otrzymujemy przyspieszenie w ruchu jednostajnie przyśpieszonym
\( a=g\cdot\left(sin{\alpha}-\mu\cdot c o s{\alpha}\right) \)
{przyspieszenie a jest równe iloczynowi przyspieszenia ziemskiego g przez różnicę sinusa kąta alfa oraz pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa}
b) Masa \( m \) porusza się w górę równi z opóźnieniem \( a \), jej energia kinetyczna maleje, energia potencjalna wzrasta. Bilans energii uzupełnia praca siły tarcia.
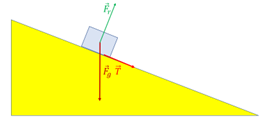
{Na równi leży ciało o masie m. Na masę działają 3 siły. Siła ciężkości F_g jest skierowana pionowo w dół, siła reakcji F_r jest skierowana prostopadle do równi w górę. Siła tarcia T jest równoległa do równi i ma zwrot w dół równi, przeciwnie do ruchu masy.}
Zasada zachowania energii:
\( \frac{m\cdot v^2}{2}=\ m\cdot g\cdot h+W \)
{Połowa iloczynu masy m przez kwadrat prędkości v równa się sumie iloczynu masy m, przyspieszenia ziemskiego g i wysokości h plus praca W}
gdzie W - to praca siły tarcia T na drodze \( s \), \( h \) - to wysokość mierzona od podstawy równi.
\( T=\mu\cdot m\cdot g\cdot c o s{\alpha} \)
{Siła tarcia T jest równe iloczynowi współczynnika tarcia mi, masy m, przyspieszenia ziemskiego g i cosinusa kąta alfa}
Po podstawieniu otrzymujemy:
\( \frac{m\cdot v^2}{2}=\ m\cdot g\cdot s\cdot s i n{\alpha}+\mu\cdot m\cdot g\cdot s\cdot c o s{\alpha} \)
{Połowa iloczynu masy m przez kwadrat prędkości v jest równa sumie iloczynu masy m, przyspieszenia ziemskiego g, drogi s i sinusa kąta alfa oraz iloczynu współczynnika tarcia mi, masy m, przyspieszenia ziemskiego g, drogi s i cosinusa kąta alfa}
czyli \( v=\sqrt{2\cdot g\cdot s\cdot\left(sin{\alpha}+\mu\cdot c o s{\alpha}\right)} \)
{prędkość v jest równa pierwiastkowi z podwojonego iloczynu przyspieszenia ziemskiego g, drogi s i sumy sinusa kąta alfa oraz pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa}
Stąd otrzymujemy przyspieszenie w ruchu jednostajnie przyśpieszonym
\( a=g\cdot\left(sin{\alpha}+\mu\cdot c o s{\alpha}\right) \)
{przyspieszenie a jest równe iloczynowi przyspieszenia ziemskiego g przez sumę sinusa kąta alfa oraz pomnożonego przez współczynnik tarcia mi cosinusa kąta alfa}
17.9. Zadanie 9 (zderzenie niesprężyste)
Zadanie 9 (zderzenie niesprężyste)
Kulka niebieska o masie \( m \), poruszająca się z prędkością \( v \), zderza się niesprężyście ze spoczywającą kulą czerwoną o masie \( M \). Zderzenie jest doskonale niesprężyste.
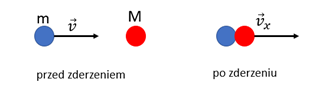
{Przed zderzeniem kulka czerwona jest nieruchoma. Kulka niebieska porusza się w prawo z prędkością v. Po zderzeniu kulki są sklejone i razem poruszają się z prędkością v_x w prawo}
Jaka część energii kinetycznej kulki niebieskiej o masie m zamieni się w energię wewnętrzną?
Rozwiązanie:
Dla zderzeń doskonale niesprężystych spełniona jest zasada zachowania pędu
\( M\cdot\vec{V}+m\cdot\vec{v}=\left(m+M\right)\cdot{\vec{v}}_x \)
{Suma iloczynu masy duże M i wektora prędkości duże V oraz iloczynu masy m i wektora prędkości v jest równa iloczynowi sumy mas m i dużego M oraz wektora prędkości v_x}
gdzie skalarnie:
\( M\cdot V=0 \)
{Iloczyn masy duże M i prędkości duże V równa się zeru}
to pęd kuli nieruchomej czerwonej, przed zderzeniem,
\( m \cdot v \)
{iloczyn masy m i prędkości v}
to pęd kulki niebieskiej uderzającej, przed zderzeniem,
\( \left(m+M\right)\cdot v_x \)
{iloczyn sumy mas m i duże M przez prędkość v_x}
to pęd obu kul, po zderzeniu. Po zderzeniu obie kule poruszają się z prędkością:
\( v_x=\frac{m\cdot v}{m+M} \)
{Prędkość v_x równa się iloczynowi masy m i prędkości v przez sumę mas m i duże M}
i posiadają wtedy energię kinetyczną:
\( E_{kx}=\frac{m+M}{2}\cdot v_x^2 \)
{Energia kinetyczna E_k_x jest równa iloczynowi połowy sumy mas m i duże M przez kwadrat prędkości v_x}
która jest mniejsza od energii
\( E_k=\frac{m\cdot v^2\ \ }{2} \)
{Energia kinetyczna E_k jest równa połowie iloczynu masy m i kwadratu prędkości v}
jaką posiadała kulka przed zderzeniem z nieruchomą kulą.
Część energii kinetycznej jaką posiadała kulka przed zderzeniem z nieruchomą kulą, przy zderzeniu kul, zamieniła się na energię cieplną.
\( \frac{E_k-E_{kx}}{E_k}=\frac{M}{m+M} \)
{Stosunek różnicy energii E_k i energii E_k_x do energii E_k jest równy stosunkowi masy duże M do sumy mas m i duże M}
17.10. Zadanie 10 (zderzenie centralne)
Zadanie 10 (zderzenie centralne)
Dwie kule o masach \( m \) - niebieska i \( M \) - czerwona zderzają się centralnie, niesprężyście.

{Początkowo kula czerwona o masie m_1 porusza się w prawo z prędkością v_1, a kulka niebieska o masie m_2 porusza się w lewo z prędkością v_2. Po zderzeniu obie kulki razem poruszają się w prawo z prędkością v_x}
Wiadomo, że energia kinetyczna kuli niebieskiej jest n razy większa od energii kinetycznej kuli czerwonej. Jaki musi być stosunek mas \( M/m \), aby po zderzeniu obie poruszały się w kierunku ruchu tej z kul która miała mniejszą energię?
Rozwiązanie:
Zderzenie jest centralne, a to znaczy, że wektory prędkości i pędów obu kul leżą na prostej przechodzącej przez środki tych kul. Zderzenie jest doskonale niesprężyste, a więc dla układu izolowanych kul spełniona jest zasada zachowania pędu.
\( M\cdot\vec{V}+m\cdot\vec{v}=\left(m+M\right)\cdot{\vec{v}}_x \)
{Suma iloczynu masy m_1 i wektora prędkości v_1 oraz iloczynu masy m_2 i wektora prędkości v_2 równa się iloczynowi sumy mas m_1 i m_2 przez wektor prędkości v_x}
Prawo zachowania pędu jest prawem wektorowym, w przypadku zderzenia centralnego sprowadza się do jednego równania skalarnego:
\( M\cdot V-m\cdot v=\left(m+M\right)\cdot v_x \)
{Różnica iloczynu masy m_1 i prędkości v_1 oraz iloczynu masy m_2 i prędkości v_2 równa się iloczynowi sumy mas m_1 i m+2 przez prędkość v_x}
gdzie za pomocą znaków „+” i „-” uwzględnione są przeciwne zwroty wektorów prędkości kulek przed ich zderzeniem.
Po zderzeniu niesprężystym obie kulki poruszają się z prędkością:
\( v_x=\frac{M\cdot V-m\cdot v}{m+M} \)
{Prędkość v_x jest równa różnicy iloczynu masy m_1 i prędkości v_1 oraz iloczynu masy m_2 i prędkości v_2 przez sumę mas m_1 i m_2}
w kierunku ruchu tej z kul która miała przed zderzeniem mniejszą energię.
Kierunek ruchu obu kulek jest taki jaki miała kulka o mniejszej energii kinetycznej.
Warunek na iloraz \( M/m \) otrzymamy rozwiązując nierówność: \( v_x > 0 \) {prędkość v_x jest większa od zera}, przy uwzględnieniu, że
\( \frac{m\cdot v^2}{2}=n\cdot\frac{M\cdot V^2}{2} \)
{Połowa iloczynu masy m_2 i kwadratu prędkości v_2 jest równa iloczynowi n przez połowę iloczynu masy m_1i kwadratu prędkości v_1}
17.11. Zadanie 11 (zasada zachowania momentu pędu)
Zadanie 11 (zasada zachowania momentu pędu)
Gwiazda o masie \( M \) i promieniu \( R \) obraca się z prędkością kątową \( \omega_1 \). Jak zmieni się energia kinetyczna gwiazdy, jeśli jej promień zmaleje dwukrotnie? Założyć, że gwiazda jest kulą i jej masa nie uległa zmianie.
Rozwiązanie
Moment bezwładności gwiazdy (kuli) na początku:
\( I_1=\frac{2}{5}M· R^2 \)
{Moment bezwładności I_1 równa się iloczynowi ułamka dwie piąte, masy M i kwadratu promienia R}
Moment bezwładności gwiazdy po skurczeniu:
\( I_2=\frac{2}{5}M· (\frac{R^2}{2}) = \frac{M \cdot R^2 }{10} \)
{Moment bezwładności I_2 równa się iloczynowi ułamka dwie piąte, masy M i kwadratu połowy promienia R, a to się równa iloczynowi masy M i kwadratu promienia R podzielonemu przez 10}
Moment bezwładności gwiazdy zmalał czterokrotnie.
\( I_2=\frac{1}{4}\cdot I_1 \)
{Moment bezwładności I_2 równa się iloczynowi
ułamka jedna czwarta oraz momentu bezwładności I_1}
Korzystamy z zasady zachowania momentu pędu:
\( {\vec{L}}_1={\vec{L}}_2 \)
{Wektor momentu pędu L_1 równa się wektorowi momentu pędu L_2}
gdzie
\( {\vec{L}}_1=I_1·ω_1 \)
{wektor momentu pędu L_1 jest równy iloczynowi momentu bezwładności I_1 i wektora prędkości kątowej omega 1}
\( {\vec{L}}_2=I_2·ω_2 \)
{wektor momentu pędu L_2 jest równy iloczynowi momentu bezwładności I_2 i wektora prędkości kątowej omega 2}
Stąd:
\( I_1·ω_1= \frac{l_1 \cdot \omega_2 }{4} \)
{Iloczyn momentu bezwładności I_1 i prędkości kątowej omega 1 jest równy iloczynowi momentu bezwładności I_1 i prędkości kątowej omega 2 podzielonemu przez cztery}
czyli
\( \omega_2=4\cdot\omega_1 \)
{Prędkość kątowa omega 2 jest 4 razy większe od prędkości kątowej omega 1}
Energia kinetyczna ruchu obrotowego gwiazdy w każdym z przypadków wynosiła:
\( E_1=\frac{1}{2}I_1·ω_{1}{^2} \)
{Energia E_1 jest równa połowie iloczynu momentu bezwładności I_1 i kwadratu prędkości kątowej omega 1}
oraz
\( E_2=\frac{1}{2}I_2·ω_2{^2}=2I_1·ω_1{^2} \)
{Energia E_2 jest równa połowie iloczynu momentu bezwładności I_2 i kwadratu prędkości kątowej omega 2, a to równa się podwojonemu iloczynowi momentu bezwładności I_1 i kwadratu prędkości kątowej omega 1}
Ostatecznie:
\( E_2=4\cdot E_1 \)
{Energia E_2 równa się iloczynowi 4 i energii E_1}
Energia kinetyczna wzrosła 4 razy.
18. Nowe pojęcia, definicje i wyrażenia
Nowe pojęcia, definicje i wyrażenia
pierwsza zasada dynamiki - każde ciało pozostaje w stanie spoczynku lub ruchu jednostajnie prostoliniowego, jeżeli nie doznaje działania siły lub działające na ciało siły się równoważą
druga zasada dynamiki - szybkość zmiany pędu ciała równa jest wpadkowej sile działającej na to ciało
trzecia zasada dynamiki - oddziaływania wzajemne dwóch ciał są zawsze równe co do wartości, ale przeciwnie skierowane
układ inercjalny - układ, w którym spełniona jest pierwsza zasada dynamiki
pęd ciała - iloczyn masy ciała i wektora jego prędkości
bezwładność - własność ciał materialnych polegająca na stawianiu oporu siłom zewnętrznym działającym na ciało oraz zachowywaniu stanu ruchu w przypadku, kiedy na ciało siły zewnętrzne nie działają
masa bezwładna - miara bezwładności ciała
ciężar ciała - siła jaka działa na ciało wskutek przyciągania grawitacyjnego
przyspieszenie ziemskie - przyspieszenia jakie uzyskuje ciało spadające swobodnie pod wpływem siły ciężkości
zasada przyczynowości - zasada zgodnie z którą znajomość warunków początkowych oraz działających na ciała sił wyznacza stan ich ruchu w dowolnej chwili czasu
równanie Newtona - układ trzech równań skalarnych (w przestrzeni trójwymiarowej) wyrażających ilościowo treść drugiej zasady dynamiki
siła tarcia - siła przeciwdziałająca ruchowi ciała; występuje, kiedy stykające się powierzchnie przesuwają się względem siebie
siła tarcia statycznego - wartość graniczna siły tarcia, przy której ciało pozostaje jeszcze nieruchome pomimo przyłożenia siły zewnętrznej
siła tarcia kinetycznego - siła tarcia występująca, kiedy ciało jest w ruchu
współczynnik tarcia - stosunek siły tarcia do siły nacisku będący właściwością trących się powierzchni
praca - iloczyn skalarny wektorów: siły działającej na ciało i przemieszczenia ciała
moc - stosunek pracy do czasu, w którym została wykonana, praca wykonana w jednostce czasu; określa szybkość zmiany energii układu fizycznego
siła zachowawcza - siła, której praca wykonana przy przemieszczeniu ciała po torze zamkniętym o dowolnym kształcie równa jest zeru
siła dyssypatywna - siła, która nie spełnia warunku siły zachowawczej
energia potencjalna - równa jest pracy jaką wykonuje siła zachowawcza przy przemieszczeniu ciała z danego punktu do punktu odniesienia
energia kinetyczna - energia ciała będącego w ruchu, połowa iloczynu masy ciała i kwadratu jego prędkości
twierdzenie o pracy i energii - praca wykonana przez wypadkową sił działających na ciało równa jest zmianie jego energii kinetycznej
prawo zachowania energii mechanicznej - całkowita energia mechaniczna ciała, na które działają tylko siły zachowawcze, jest stała
prawo zachowania energii - energia całkowita układu odosobnionego jest stała.
prawo zachowania pędu - jeżeli na układ nie działają siły zewnętrzne lub działa układ sił zrównoważonych, to pęd układu zachowuje wartość stałą
zderzenie sprężyste - jeżeli w procesie zderzenia zachowana jest energia kinetyczna
zderzenie centralne - jeśli przed zderzeniem i po zderzeniu ciała poruszają się wzdłuż jednej prostej
ruch obrotowy - ruch, w którym wszystkie punkty danego ciała poruszają się po okręgach, których środki znajdują się na jednej prostej zwanej osią obrotu
prędkość kątowa - wielkość wektorowa, której wartość równa jest pochodnej położenia kątowego względem czasu
częstość (prędkość kątowa, częstość kołowa, pulsacja) - pochodna przemieszczenia kątowego względem czasu (kąt zakreślony w jednostce czasu przez ciało będące w ruchu obrotowym)
okres - czas, w którym ciało wykonuje jeden pełny obrót
częstotliwość - liczba obrotów wykonanych przez ciało w czasie jednej sekundy, odwrotność okresu
przyspieszenie kątowe - pochodna prędkości kątowej względem czasu
moment siły - iloczyn wektorowy promienia wodzącego mającego początek w danym punkcie i siły działającej na ciało
moment pędu - iloczyn wektorowy promienia wodzącego punktu materialnego i jego pędu
ramię siły - składowa promienia wodzącego prostopadła do linii działania siły
moment bezwładności - iloczyn masy przez kwadrat odległości od osi obrotu, dla układu punktów - suma momentów bezwładności wszystkich punktów
druga zasada dynamiki ruchu obrotowego - szybkość zmiany momentu pędu równa jest momentowi siły
twierdzenie Steinera - wzór określający moment bezwładności względem osi nie przechodzącej przez środek masy ciała
zasada zachowania momentu pędu - moment pędu układu, na który nie działa moment sił zewnętrznych jest wektorem stałym