3. Dynamika
W tym rozdziale poznamy prawa ruchu, czyli zasady pozwalające powiązać własności ruchu z przyczynami, które go wywołują. Przedyskutujemy przykłady pokazujące równoważność stanu spoczynku i ruchu jednostajnego prostoliniowego, wprowadzimy pojęcie układu inercjalnego i poznamy przypadki układów nieinercjalnych. Omówimy relacje pomiędzy siłą i przyspieszeniem i wprowadzimy pojęcie masy bezwładnej. Zobaczymy, że zapoczątkowana przez Galileusza i Newtona mechanika klasyczna potrafi opisać w postaci prostych praw niezwykłą złożoność ruchów, wśród których żyjemy.
10. Przykłady: zderzenia ciał
10.1. Zderzenia sprężyste
Zderzenia sprężyste
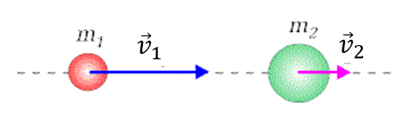
- Rozpatrzymy przykład sprężystego zderzenia centralnego, na przykładzie zderzenia kul o masach \( m_1 \) i \( m_2 \) poruszających się wzdłuż jednej prostej z prędkościami \( v_1 \) i \( v_2 \) w danym układzie odniesienia.
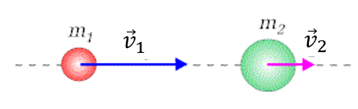
Rysunek 3.10.1.1. Kule poruszające się z różnymi prędkościami wzdłuż jednej prostej \( m_1 \) i \( v_1 \) oraz iloczynu \( m_2 \) i \( v_2 \)
{Do obu kul zaczepione są wektory prędkości o kierunku poziomym i zwrocie w prawo. Kula mniejszej o masie m_1 znajduje się z lewej strony i ma prędkość v_1. Kula większa o masie m_2 znajduje się z prawej strony i ma prędkość v_2}
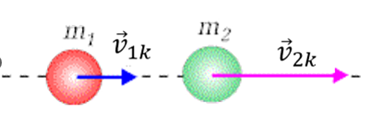
Zapiszmy prawa zachowania. Mówią one, że suma pędów oraz energii kinetycznych przed i po zderzeniu są sobie równe. Oznaczymy prędkości kul po zderzeniu odpowiednio \( v_{1k} \) i \( v_{2k} \). Rozpatrujemy przypadek jednowymiarowy, wiec zasadę zachowania pędu zapiszemy w postaci skalarnej zakładając, że zwroty wszystkich wektorów pędów są jednakowe.
Prawo zachowania pędu:
{Suma iloczynu masy m_1 i prędkości v_1 oraz iloczynu masy m_2 i prędkości v_2 jest równa sumie iloczynu masy m_1 i prędkości v_1_k oraz iloczynu masy m_2 i prędkości v_2_k}
Prawo zachowania energii:
{Suma połowy iloczynu masy m_1 przez drugą potęgę prędkości v_1 oraz połowy iloczynu masy m_2 przez drugą potęgę prędkości v_2 jest równa sumie połowy iloczynu masy m_1 przez drugą potęgę prędkości v_1_k oraz połowy iloczynu masy m_2 przez drugą potęgę prędkości v_2_k}
Przepiszmy te równania nieco inaczej przenosząc na prawą stronę wyrazy z \( m_1 \), a na prawą wyrazy z \( m_2 \). Równanie (3.10.1.1) zapisujemy w postaci:
{IIloczyn masy m_1 przez różnicę prędkości v_1 i prędkości v_1_k jest równy iloczynowi masy m_2 przez różnicę prędkości v_2_k i prędkości v 2}
Analogicznie przepisujemy równanie (3.10.1.2)
{Iloczyn masy m_1 przez różnicę kwadratów prędkości v_1 i prędkości v_1_k jest równy iloczynowi masy m_2 przez różnicę kwadratów prędkości v_2_k i prędkości v_2}
Dzieląc stronami równanie (3.10.1.4) przez (3.10.1.3) i wykonując elementarne działania arytmetyczne otrzymujemy związek, który jest niezależny od mas zderzających się kul. (Zakładamy, że różnice prędkości w równaniu (3.10.1.3) nie są równe zeru.)
{Suma prędkości v_1 i prędkości v_1_k jest równa sumie prędkości v_2 i prędkości v_2_k}
Związek ten można przepisać w postaci:
{Różnica prędkości v_1 i prędkości v_2 jest równa różnicy prędkości v_2_k i prędkości v_1_k}
Prędkość zbliżania się kul przed zderzeniem równa jest prędkości ich oddalania się po zderzeniu czyli ich prędkości względne przed i po zderzeniu są takie same.
Możemy teraz wyznaczyć prędkości kul po zderzeniu. Z równania (3.10.1.6) widać, że
{Prędkości v_2_k jest równa prędkości v_1 minus prędkość v_2 plus prędkości v_1_k}
Podstawiając to do równania (3.10.1.7) możemy wyznaczyć prędkość pierwszej kuli po zderzeniu:
{Prędkość v_1_k jest równa sumie iloczynu prędkości v_1 i ilorazu różnicy masy m_1 i masy m_2 przez sumę masy m_1 i masy m_2 oraz iloczynu prędkości v_2 i podwojonego ilorazu masy m_2 przez sumę masy m_1 i masy m_2}
Podobnie uzyskuje się wzór na prędkość drugiej kuli po zderzeniu
{Prędkość v_2_k jest równa sumie iloczynu prędkości v_2 i ilorazu różnicy masy m_2 i masy m_1 przez sumę masy m_1 i masy m_2 oraz iloczynu prędkości v_1 i podwojonego ilorazu masy m_1 przez sumę masy m_1 i masy m_2}
Uzyskaliśmy poszukiwane wzory ogólne na prędkości kul po zderzeniu. Rozpatrzmy teraz kilka szczególnych i ciekawych przypadków podstawiając założone warunki do wzorów (3.10.1.8) i (3.10.1.9). Zamieszczona poniżej tabela określa te warunki i pokazuje ich ilustrację graficzną przed i po zderzeniu.
Tabela 2. Różne przypadki zderzeń sprężystych kul
|
Warunek |
Przed zderzeniem |
Po zderzeniu |
|
|---|---|---|---|
|
A |
\( m_1 = m_2 \) {masa m_1 jest równa masie m_2} |
{Dwie kule o masach m_1 i m_2 poruszają się
wzdłuż jednej prostej w prawo. Kula m_2 znajdująca się z prawej strony porusza
się z prędkością v_2. Kula o masie m_1 znajdująca się z lewej strony porusza
się z prędkością v_1 . Środki obu kul leżą na prostej wzdłuż której poruszają
się kule.} |
{Dwie kule o masach m_1 i m_2 poruszają się
wzdłuż jednej prostej w prawo. Kula m_2 znajdująca się z prawej strony porusza
się z prędkością v_2_k. Kula o masie m_1 znajdująca się z lewej strony porusza
się z prędkością v_1_k} |
|
kule wymienią się prędkościami |
\( v_{k1} = v_2 \) oraz \( v_{2k} = v_1 \) {Prędkość v_1_k jest równa prędkości v_2.
Prędkość v_2_k jest równa prędkości v_1} |
||
|
B |
\( \begin{array}{{>{\displaystyle}l}} m_{1}= m_{2}\\ v_{2} =0 \end{array} \) {masa m_1
jest równa masie m_2. Prędkość v_2 jest równa zero} |
{Kula o masie m_2 znajdująca się z prawej strony nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w prawo z prędkością v_1} |
{Kula o masie m_1 znajdująca się z lewej strony nie porusza się. Kula o masie m_2 znajdująca się z prawej strony porusza się w prawo z prędkością v_2 k} |
|
pierwsza kula zatrzymuje się po zderzeniu, druga porusza się z prędkością pierwszej przed zderzeniem |
\( v_1 = 0 \) oraz \( v_{2k}=v_1 \) {Prędkość v_1_k jest równa zero. Prędkość v_2_k
jest równa prędkości v_1} |
||
|
\( \begin{array}{{>{\displaystyle}l}} m_{2} \gg m_{1}\\ v_{2} =0 \end{array} \) {masa m_2 jest dużo większa od masy m_1. Prędkość v_2 jest równa zero} |
{Kula o masie m_2 znajdująca się z prawej strony
nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w
prawo z prędkością v_1} |
{Kula o masie m_2 znajdująca się z prawej strony
nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w
lewo z prędkością v_1_k} |
|
|
pierwsza kula odbije się z prawie niezmienioną prędkością, druga (praktycznie) pozostaje w spoczynku |
\( v_{1k}\cong{-v}_1 \) oraz \( v_{2k}\cong0 \) {Prędkość v_1_k jest w przybliżeniu równa minus
prędkości v_1. Prędkość v_2_k jest w przybliżeniu równa zeru} |
||
|
D |
\( \begin{array}{{>{\displaystyle}l}} m_{2} \ll m_{1}\\ v_{1} =0 \end{array} \) {masa m_2 jest dużo mniejsza od masy m_1. Prędkość v_2 jest równa zero} |
{Kula o masie m_2 znajdująca się z prawej strony nie porusza się. Kula o masie m_1 znajdująca się z lewej strony porusza się w prawo z prędkością v_1} |
{Obie kule poruszają się wprawo. Kula o masie m_2 znajdująca się z prawej strony porusza się z prędkością v_2_k. Kula o masie m_1 znajdująca się z lewej strony porusza się w prawo z prędkością v_1_k} |
|
pierwsza kula prawie nie zmieni swej prędkości, druga uzyska podwójną prędkość pierwszej |
\( v_{1k}\cong v_1 \) oraz \( v_{2k}\cong2\cdot v_1 \) {Prędkość v_1_k jest w przybliżeniu równa
prędkości v_1. Prędkość v_2_k jest w przybliżeniu równa podwojonej prędkości
v_1} |