2. Kinematyka
8. Zadania
8.3. Zadanie 3 (zasada niezależności ruchów)
Zadanie 3 (zasada niezależności ruchów)
Chłopiec, który przeprawia się przez rzekę o szerokości \( D \);wypływa z punktu \( A \) i przez cały czas ustawia kajak pod kątem \( \alpha \) względem brzegu. Wyznacz prędkość kajaka względem
wody, jeżeli prędkość wody w rzece jest stała i równa \( v_s \), a kajak zniosło na odległość
\( s \).
a ) poniżej (w dół rzeki) punktu \( B \), który znajduje się dokładnie naprzeciw punktu \( A \), jeśli kajak płynie ukośnie pod prąd.
b ) poniżej (w dół rzeki) punktu \( B \), który znajduje się dokładnie naprzeciw punktu \( A \), jeśli kajak płynie ukośnie z prądem.
c ) powyżej (w górę rzeki) punktu \( B \), który znajduje się dokładnie naprzeciw punktu \( A \). Kajak płynie ukośnie pod prąd.
Rozwiązanie:
a ) Początek układu współrzędnych kartezjańskich (punkt 0,0) umieszczamy w miejscu startu kajaka (punkt \( (0, 0) \). Daje to warunki początkowe, dla czasu \( t = 0 \), \( x(0) = 0 \) i \( y(0) = 0 \)
Oznaczmy nieznaną prędkość kajaka względem wody przez \( \vec{vk} \). Rozłóżmy tę prędkość na składowe \( v_{kx} \) i \( v_{ky} \).
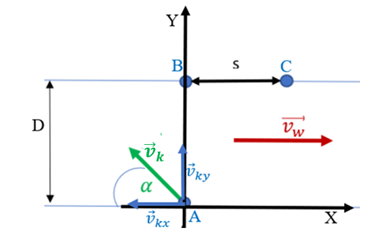
{Brzegi rzeki zostały zaznaczone dwiema prostymi równoległymi, między którymi odległość wynosi D. Proste wskazują godzinę trzecią. Oś X dwuwymiarowego układu współrzędnych prostokątnych pokrywa się z dolną prostą i wskazuje godzinę trzecią. Oś Y jest prostopadła do obu prostych i wskazuje godzinę dwunastą. Na dolnej prostej został zaznaczony punkt A, który jest początkiem układu współrzędnych. Na górnej prostej zostały zaznaczone dwa punkty: punkt B jest punktem przecięcia osi Y z tą prostą, punkt C znajduje się w odległości s od punktu B z prawej jego strony. W punkcie A będącym początkiem układu współrzędnych zaczepiony został wektor v _k, który wskazuje godzinę jedenastą. Wektor v _k został rozłożony na składowe – dwa wektory zaczepione w punkcie A, z których jeden v _k _x wskazuje godzinę dziewiątą, a drugi v _k _y wskazuje godzinę dwunastą. Między wektorami v _k _x i v _k został zaznaczony kąt alfa, Powyżej osi X, pomiędzy prostymi równoległymi znajduje się wektor v _w, równoległy do osi X i tym samym zwrocie co oś, wskazujący godzinę trzecią.}
Wówczas
wektor prędkości kajaka
\( \vec{v}\left(t\right)=\left[v_w-v_{kx};v_{ky}\right] \)
{Pierwsza współrzędna wektora prędkości v _w chwili czasu t jest różnicą prędkości v _w i składowej prędkości kajaka v _k _x. Druga współrzędna jest równa składowej prędkości v _k _y}
Ruch kajaka wynika z nałożenia się dwóch niezależnych ruchów, w kierunku osi \( OX \) z prędkością wody w rzece \( v_w \) i składowej prędkości kajaka\( v_{kx} \) oraz w kierunku osi \( OY \) ze stałą prędkością \( v_{ky} \).
Możemy zapisać równania ruchu w kierunku osi \( OY \):
\( y\left(t\right)=v_{ky}·t \)
{Współrzędna y w chwili czasu t jest równa iloczynowi prędkości v _k _y i czasu t}
oraz w kierunku osi \( OX \):
\( x\left(t\right)=\left(v_w-v_{kx}\right)·t \)
{Współrzędna x w chwili czasu t jest równa iloczynowi różnicy prędkości wody v _w i składowej prędkości kajaka v _k _x przez czas t}
gdzie \( v_{ky}=v_k\cdot\sin{\alpha} \), \( v_{kx}=v_k\cdot\cos{\alpha} \)
{Składowa prędkości v _k _y jest równa iloczynowi prędkości kajaka v _k przez sinus kąta alfa. Składowa prędkości kajaka v _k _x jest równa iloczynowi prędkości kajaka v _k przez cosinus kąta alfa.}
Eliminując z powyższych równań ruchu czas otrzymujemy równanie toru:
\( y=\frac{v_{ky}}{\left(v_w-v_{kx}\right)}\cdot x \)
{Współrzędna y jest równa ilorazowi składowej prędkości kajaka v _k _y przez różnicę prędkości wody v _w i prędkości kajaka v _k _x pomnożonemu przez x}
Gdy współrzędna \( y = D \), to współrzędna \( x = s \), stąd
\( D=\frac{v_{ky}}{\left(v_w-v_{kx}\right)}\cdot s \)
{Szerokość rzeki D jest równa ilorazowi składowej prędkości v _k _y przez różnicę prędkości wody v _w i składowej prędkości kajaka v _k _x pomnożonemu przez s}
Po podstawieniu \( v_{kx} \) i \( v_{ky} \) otrzymujemy:
\( D = \frac{s \cdot v_k sin \alpha}{v_w-v_k \cdot cos \alpha} \)
{Szerokość rzeki D jest równa ilorazowi iloczynu s ; prędkości kajaka v _k i sinusa kąta alfa przez różnicę prędkości wody v _w i prędkości kajaka v _k pomnożonej przez cosinus kąta alfa}
Stąd po przekształceniach znajdujemy prędkość kajaka względem wody
\( v_k=\frac{D{\cdot v}_w}{s \cdot \sin{\alpha}+D \cdot \cos{\alpha}}\)
{Prędkość kajaka v _k jest równa ilorazowi iloczynu szerokości rzeki D i prędkości wody v _w przez sumę odległości s pomnożoną przez sinus kąta alfa i szerokości rzeki D pomnożonej przez cosinus kąta alfa}
b) Zadanie rozwiązujemy podobnie jak w punkcie a)
Zmienia się wektor prędkości kajaka
\( \vec{v}\left(t\right)=\left[v_w+v_{kx};v_{ky}\right] \)
{Wektor prędkości v _w chwili czasu t ma pierwszą współrzędną równą sumie prędkości v _w i v _k _x. Druga współrzędna jest równa v _k _y}
oraz równanie ruchu w kierunku osi \( OX \):
\( x\left(t\right)=\left(v_w+v_{kx}\right)·t \)
{Współrzędna x w chwili czasu t jest równa iloczynowi sumy prędkości wody v _w i prędkości składowej kajaka v _k _x przez czas t}
Równanie ruchu w kierunku osi \( OY \) pozostaje takie samo.
c) Zadanie rozwiązujemy podobnie jak w punkcie a)
W tym przypadku wektor prędkości kajaka oraz równania ruchu pozostają takie same.
Zmienia się jedynie warunek dotyczący punktu docelowego: gdy współrzędna \( y = D \) {współrzędna y równa się D}, to współrzędna \( x = -s \) {współrzędna x równa się minus s}.