2. Kinematyka
| Strona: | LeIA |
| Kurs: | Start z LeIA - przykładowy kurs |
| Książka: | 2. Kinematyka |
| Wydrukowane przez użytkownika: | Gość |
| Data: | niedziela, 28 czerwca 2026, 16:20 |
1. Zjawiska ruchu
Ruch należy do najczęściej obserwowanych zjawisk fizycznych. Z wieloma jego przejawami mamy do czynienia w naszym bezpośrednim otoczeniu, chociaż nie zawsze możemy obserwować go bezpośrednio, jak w przypadku atomów i cząstek elementarnych. Jest on również odpowiedzialny za wiele zjawisk fizycznych: termicznych, akustycznych, czy elektrycznych.
Często ruch zachodzi z tak dużą prędkością i w tak krótkim czasie, że nie można obserwować bezpośrednio jego przebiegu. Wówczas staramy się za pomocą odpowiednich przyrządów zarejestrować tor poruszającego się obiektu i z jego kształtu wnioskować o prędkości i czasie trwania zjawiska.
Ruch polega na zmianie wzajemnego położenia ciał. Zmiana ta odbywa się w czasie i przestrzeni. Jej opis polega na znalezieniu związków pomiędzy upływem czasu a zmianą położenia ciał. W tym celi wprowadza się szereg pojęć i definicji. Wymieńmy najbardziej podstawowe:
- Układ odniesienia – ciało lub zbiór ciał względem których opisujemy ruch innych ciał.
- Punkt materialny - ciało, którego rozmiary w badanym ruchu można uznać za pomijalnie małe.
- Stan spoczynku - względem danego układu odniesienia ma miejsce wtedy, kiedy ciało nie zmienia swego położenia względem tego układu.
- Ruch postępowy - ruch, w którym wszystkie punkty danego ciała przemieszczają się tak samo co do wartości i kierunku względem zadanego układu odniesienia.
- Ruch prostoliniowy - ruch, w którym przemieszczenie odbywa się wzdłuż linii prostej.
- Ruch obrotowy - ma miejsce, kiedy wszystkie punkty danego ciała poruszają się po okręgach, których środki znajdują się na jednej prostej. Prostą tą nazywa się osią obrotu.
- Ruch płaski - kierunek ruchu zmienia się, ale ruch zachodzi w jednej płaszczyźnie.
- Opis ruchu, w którym odpowiadamy na pytania „kiedy” i „gdzie” znajduje się ciało, czyli analizujemy go w kategoriach przestrzeni i czasu, a nie zajmujemy się jego przyczynami nosi nazwę kinematyki.
- Badaniem wzajemnych oddziaływań ciał i analizą związków pomiędzy siłami działającymi na ciała a ich ruchem zajmuje się dział fizyki zwany dynamiką.
Nasze rozważania zaczniemy od kinematyki punktu materialnego.
2. Układy współrzędnych i wektor położenia
Układy współrzędnych i wektor położenia
Przy opisie ruchu posługujemy się pojęciem układu współrzędnych, który wiążemy z wybranym przez nas układem odniesienia. Opis ten polega na przyporządkowaniu danemu punktowi P zespołu liczb określających, w każdej chwili czasu w jednoznaczny sposób, jego położenie w przestrzeni oraz kierunek i wartość jego prędkości i przyspieszenia. Wybór układu odniesienia oraz odpowiedniego układu współrzędnych zależy od rodzaju i specyfiki opisywanego ruchu.
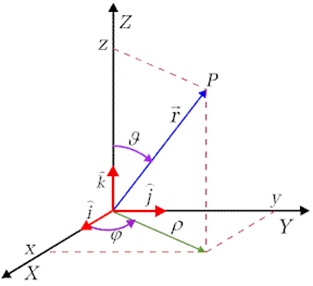
Rysunek 2.2.1. Punkt P i jego współrzędne w przestrzeni trójwymiarowej.
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. Oś X wskazuje godzinę siódmą, oś Y wskazuje godzinę trzecią, oś Z wskazuje godzinę dwunastą. Na każdej z osi zaznaczone są wektory o kierunku i zwrocie odpowiadającej im osi i początku w początku układu współrzędnych. Są to wersory, czyli wektory o długości jeden. W układzie współrzędnych zaznaczono punkt P w ten sposób, że jego wszystkie współrzędne są dodatnie. Wektor o początku w początku układu współrzędnych i końcu w punkcie P jest jego wektorem położenia r. Na płaszczyźnie XY narysowany został wektor ro, którego początek jest w początku układu współrzędnych, a koniec jest rzutem końca wektora położenia r na tę płaszczyznę. Kąt między ro a osią X został oznaczony przez fi, natomiast kąt między wektora położenia r nb a osią Z został oznaczony teta.}
Na Rysunku 2.2.1 pokazane są wielkości określające położenie punktu w przestrzeni trójwymiarowej za pomocą wektora położenia \( \vec{r} \) {r} (zwanego też promieniem wodzącym). Początek tego wektora znajduje się w początku układu współrzędnych, a koniec w danym punkcie przestrzeni. Wektor położenia punktu P zaznaczony jest kolorem niebieskim. Kolorem czerwonym zaznaczone są wersory, czyli wektory o jednostkowych długościach, określające kierunki i zwroty osi układu współrzędnych prostokątnych. ρ {ro} jest rzutem wektora położenia \( \vec{r} \) {r} na płaszczyznę XY ;φ {fi} – kątem między rzutem wektora położenia ρ {ro}, a osią X, natomiast \( \theta \) {teta} jest kątem między promieniem wodzącym \( \vec{r} \) {r} a osią Z.
Więcej informacji o wektorach zawiera plik zamieszczony na stronie przedmiotu Przypomnienie wiadomości o wektorach, pochodnych i całkach.
Układ współrzędnych prostokątnych (kartezjański).
Położenie ciała w układzie współrzędnych prostokątnych wyznaczone jest przez podanie trzech liczb określających współrzędne wektora położenia (x, y, z) względem początku układu (0, 0, 0) na trzech przecinających się w tym punkcie prostopadłych do siebie prostych, zwanych osiami (X, Y, Z). Układ jest prawoskrętny (Rysunek 2.2.1), kiedy obrót osi X w kierunku osi Y wyznacza kierunek osi Z zgodnie z regułą śruby prawoskrętnej. Wektor położenia w układzie prostokątnym jest sumą wektorową wersorów \( \hat{i}, \hat{j}, \hat{k} \) {i, j, k} pomnożonych przez odpowiadające im współrzędne promienia wodzącego:
{wektor położenia r równa się sumie iloczynów wersorów i, j, k przez odpowiadające im współrzędne promienia wodzącego x, y, z}
Długość wektora położenia jest liczbą dodatnią i wynosi
{długość wektora r jest równa pierwiastkowi kwadratowemu sumy kwadratów jego współrzędnych x, y, z}
3. Prędkość
Prędkość
Wiemy już jak wyznaczyć położenie punktu materialnego w przestrzeni trójwymiarowej posługując się układem współrzędnych prostokątnych. Ruch - to jednak zmiana tego położenia w czasie, co oznacza, że zarówno długość jak i kierunek wektora położenia są funkcją czasu t.
Zapiszemy to następująco:
{wektor położenia r jest funkcją czasu i równa się sumie iloczynów składowej x jako funkcji czasu razy wersor i, składowej y jako funkcji czasu razy wersor j oraz składowej z jako funkcji czasu razy wersor k}
Podobnie zapisać możemy przyrost wektora położenia w zadanym przedziale czasu \( \Delta{t} \):
{Przyrost wektora położenia r jest równy sumie iloczynów przyrostu x razy wersor i, przyrostu y razy wersor j oraz przyrostu z razy wersor k}
Zmianę położenia w jednostce czasu otrzymamy przez podzielenie przyrostu wektora położenia przez przyrost czasu:
{Iloraz przyrostu wektora położenia r przez przyrost czasu t równa się sumie iloczynów przyrostu x przez przyrost t razy wersor i przyrostu y przez przyrost t razy wersor j oraz przyrostu z przez przyrost t razy wersor k}
Kiedy przyrost czasu dąży do zera, iloraz różnicowy (2.3.3) przechodzi w pochodną wektora położenia względem czasu.
{Granica przy przyroście czasu delta t dążącym do zera ilorazu przyrostu wektora położenia r przez przyrost czasu delty t jest równa pochodnej wektora położenia r względem czasu t zapisanej jako iloraz położenia wektora d r przez czas d t, a to z kolei równa się sumie iloczynów pochodnej x względem czasu t razy wersor i pochodnej y względem czasu t razy wersor j oraz pochodnej z względem czasu t razy wersor k}
Nieskończenie małe przyrosty \( \Delta \) (delta ) wielkości oznaczamy symbolem \( d \) i nazywamy różniczkami. Iloraz różniczek dwóch wielkości nazywamy pochodną pierwszej z nich względem drugiej.
3.1. Pochodna wektora położenia względem czasu
Pochodna wektora położenia względem czasu
Pochodna wektora położenia względem czasu w zadanej chwili \( t \) nazywa się prędkością chwilową ciała
{wektor prędkości jest równy pochodnej wektora położenia r względem czasu t}
Z matematyki wiemy, że pochodna określa lokalną szybkość zmiany funkcji i wyznaczona jest przez styczną do niej w danym punkcie. Naszą funkcją jest położenie ciała, a zmiana tego położenia w czasie wyznacza tor ciała w przestrzeni. Oznacza to, że kierunek wektora prędkości chwilowej pokrywa się ze styczną do toru w danym punkcie, a jego zwrot wyznaczony jest przez znak przyrostu wektora położenia.
Więcej informacji o pochodnych zawiera INDEX - przypomnienie wiadomości z matematyki.
Na Rysunku 2.3.1.1 kolorem czerwonym pokazany jest przykładowy tor ciała w przestrzeni. Rzut toru na płaszczyznę poziomą ma kolor różowy. Kolorem niebieskim zaznaczone są promienie wodzące dla dwóch punktów na torze \( \vec{r} \) i \( \vec{r}{'}, \) a kolorem zielonym ich różnica, czyli przyrost wektora położenia \( ( \Delta \vec{r}) \).
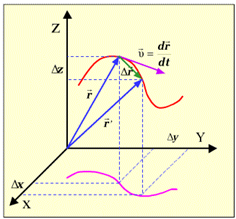
Rysunek 2.3.1.1. Przykładowy tor ciała w przestrzeni.
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. oś X wskazuje godzinę siódmą, oś Y wskazuje godzinę trzecią, oś Z wskazuje godzinę dwunastą. W układzie tym został narysowany krzywoliniowy tor, na którym obrano dwa punkty. Dwa wektory o początkach w początku układu współrzędnych i końcach w punktach obranych na torze wskazują godzinę pierwszą i drugą i oznaczone są wektorem r i r prim. Wektor, którego początkiem jest koniec wektora r, a końcem koniec wektora r prim został oznaczony delta r. Rzuty wektora delta r na osie układu współrzędnych zostały oznaczone odpowiednio przez delta x, delta y, delta z. Wektor styczny do toru, którego początkiem jest koniec wektora r został oznaczony jako wektor v.}
Na osiach układu współrzędnych zaznaczone są składowe wektora \( \Delta \vec{r} \) {wektor delta r} . Zmiana położenia odbywa się w czasie, a więc każdemu punktowi na torze odpowiada określony czas. Kiedy jego różnica zmierza do zera, wektory położenia zbliżają się do siebie, a iloraz przyrostu wektora położenia do przyrostu czasu zmierza do skończonej wartości, która jest właśnie prędkością chwilową ciała. Wektor prędkości zaznaczony jest kolorem fioletowym. Jest on styczny do toru ciała w każdym jego punkcie.
3.2. Składowe wektora prędkości
Wspominano już, że specyfika ruchu sugeruje wybór odpowiedniego układu współrzędnych. Kiedy analizujemy ruch pasażera pędzącego pociągu widać celowość zastosowania dwuwymiarowego układu prostokątnego i wybór osi wzdłuż i w poprzek kierunku ruchu pociągu.
Zdefiniowany już wcześniej wektor prędkości w układzie współrzędnych prostokątnych możemy zapisać w postaci sumy jego składowych jako:
{wektor prędkości v jest równy pochodnej wektora położenia r względem czasu t, a to z kolei równa się sumie iloczynów współrzędnych wektora prędkości (v _x, v _y, v _z ) przez odpowiadające im wersory ( i, j, k)}
gdzie współrzędne wektora prędkości wynoszą:
{współrzędna prędkości v _x równa się pochodnej współrzędnej x względem czasu t, współrzędna prędkości v _y równa się pochodnej współrzędnej y względem czasu t, współrzędna prędkości v z równa się pochodnej współrzędnej z względem czasu t}
Forma tego zapisu jest analogiczna do zapisu wektora położenia, wzór (2.2.1)
Wartość bezwzględną wektora prędkości wyrażoną przez jej współrzędne w układzie kartezjańskim zapiszemy analogicznie do wzoru (2.2.2)
{wartość wektora prędkości v jest równa pierwiastkowi kwadratowemu sumy kwadratów jej współrzędnych (v _x, v _y, v _z)}
Zwróćmy uwagę, że w życiu codziennym właśnie wartość bezwzględną (moduł) prędkości nazywamy „prędkością” lub „szybkością” nie interesując się na ogół kierunkiem tego wektora.
4. Przemieszczenie i droga
Przemieszczenie i droga
Wzór
{wektor prędkości v równa się pochodnej wektora położenia r względem czasu t}
wyrażający definicję prędkości łączy trzy podstawowe pojęcia fizyki ruchu: czas, przemieszczenie i prędkość. Zapiszmy go w następujący sposób
{różniczka wektora położenia r równa się iloczynowi wektora prędkości v i różniczki czasu t}
Wzór ten wyraża różniczkę wektora położenia, czyli przemieszczenie jako iloczyn prędkości chwilowej i różniczki czasu. Przemieszczenie ciała w skończonym przedziale czasu : \( t = t_2 - t_1 \) {czas t jest równy różnicy czasów t _1 i t _2}
{wektor przemieszczenia r _1 _2 równa się różnicy wektora położenia r _2 w chwili czasu t _2 i wektora położenia r _1 w chwili czasu t _1}
W sytuacji przedstawionej na Rysunku 2.4.1 przemieszczenie pomiędzy punktami \( A \) i \( B \) odbywało się po skomplikowanej i długiej drodze (zaznaczonej kolorem pomarańczowym). Przemieszczenie końcowe jest niewielkie, bowiem punkt \( B \) położony jest w pobliżu punktu \( A \). Na rysunku pokazane są kolorem fioletowym dwa przemieszczenia, które kompensują się wzajemnie przy obliczaniu wektorowej sumy przyrostów.
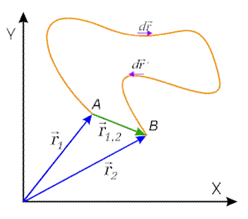
Rysunek 2.4.1. Przemieszczenie i droga
{Na rysunku przedstawiono pierwszą ćwiartkę dwuwymiarowego układu współrzędnych kartezjańskich. Oś X wskazuje godzinę trzecią, oś Y wskazuje godzinę dwunastą. Punkty A i B są końcami dwóch wektorów odpowiednio r _1 i r _2, których początkiem jest początek układu współrzędnych. Wektor o początku w punkcie A i końcu w punkcie B został oznaczony r _1 _2. Punkty A i B zostały połączone krzywą leżącą powyżej wektora r _1 _2. Poruszając się wzdłuż tej krzywej zgodnie z ruchem wskazówek zegara zaznaczono styczne do niej dwa krótkie wektory o tym samym kierunku i przeciwnych zwrotach: wektor d r i wektor d r prim.}
Kiedy interesuje nas długość przebytej drogi,
musimy obliczać sumę długości, czyli bezwzględnych wartości przemieszczeń elementarnych.
Czynimy to zamieniając wektor prędkości we wzorze jego wartością bezwzględną.
Zauważmy, że kiedy prędkość w danym przedziale czasu nie zmienia swej wartości bezwzględnej uzyskujemy wzór:
{droga s jest równa iloczynowi wartości prędkości v i czasu t}
5. Przyspieszenie i jego składowe: normalna i styczna i
Przyspieszenie i jego składowe: normalna i styczna i
Zdefiniowaliśmy prędkość jako granicę stosunku przyrostu wektora położenia do przedziału czasu, w którym ten przyrost nastąpił. Podobnie, granicę stosunku przyrostu wektora prędkości do czasu, w którym ten przyrost nastąpił nazywamy przyspieszeniem chwilowym lub krótko - przyspieszeniem. Przyspieszenie jest więc pochodną wektora prędkości względem czasu, a co za tym idzie - drugą pochodną względem czasu wektora położenia. W układzie współrzędnych prostokątnych zapiszemy to w następujący sposób.
{Granica ilorazu przyrostu delta wektora prędkości v przez przyrost delta czasu t przy przyroście czasu t dążącym do zera jest równa pochodnej wektora prędkości v względem czasu t, co jest równe sumie iloczynów pochodnych współrzędnych wektora prędkości (v _x, v _y, v _z) względem czasu t przez odpowiednie wersory i, j, k, a to z kolei równa się drugiej pochodnej wektora położenia r względem czasu, co jest równe wektorowi przyspieszenia a}
Wektor przyspieszenia możemy zapisać jako sumę dwóch prostopadłych do siebie składowych stycznej \( \vec{a_s} \) i normalnej \( \vec{a_n} \):
{wektor przyspieszenia a> równa się sumie wektora przyspieszenia stycznego a_s i wektora przyspieszenia normalnego a_n}
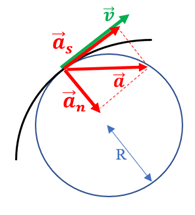
Rysunek 2.5.1. Składowa styczna i normalna przyspieszenia
{Na rysunku przedstawiony został okrąg o promieniu R i fragment krzywoliniowego toru, który ma jeden punkt wspólny z okręgiem. W punkcie styczności zaczepione są wektory: v, a, a _s, a _n. Wektory: v i as są styczne do okręgu i do toru i ma ją ten sam zwrot. Wektor a _n jest prostopadły do wektora as i ma zwrot do środka okręgu. Wektor a jest sumą wektorową a _s i a _n, ma kierunek zgodny z kierunkiem przekątnej prostokąta utworzonego przez wektory a _s i jest zaczepiony w punkcie styczności okręgu i toru.}
Składowa styczna przyspieszenia \( \vec{a_s} \) jest zawsze zgodna z aktualnym kierunkiem wektora prędkości, czyli jest styczna do toru w danym punkcie i jest związana ze zmianą wartości prędkości. Ma ten sam zwrot jak wektor prędkości, gdy ruch jest przyspieszony, a przeciwny zwrot w przypadku ruchu opóźnionego. Można pokazać, że wartość \( a_s \) jest równa pochodnej wartości prędkości:
{Wartość przyspieszenia stycznego a _s jest równa pochodnej wartości prędkości v względem czasu t}
Składowa normalna przyspieszenia \( \vec{a_n} \) jest skierowana do środka okręgu określającego aktualny promień krzywizny toru. Jest związana ze zmianą kierunku ruchu. Można wykazać, że jej wartość \( a_n \) jest równa kwadratowi wartości prędkości podzielonemu przez promień krzywizny toru \( R \).
{Wartość przyspieszenia normalnego a _n jest równa ilorazowi kwadratu wartości prędkości v przez promień krzywizny R}
Zauważmy, że ciało porusza się ruchem przyspieszonym także
wtedy, kiedy bezwzględna wartość jego prędkości nie zmienia się, ale tor jego jest
krzywoliniowy. Szczególnym przypadkiem takiego ruchu jest ruch po okręgu. Przyspieszenie
normalne w przypadku ruchu po okręgu nazywane jest też przyspieszeniem dośrodkowym.
6. Przykład ruchu - rzut ukośny
Przykład ruchu - rzut ukośny
Ruch, w którym przyspieszenie zachowuje stałą wartość co do wartości bezwzględnej i kierunku nazywamy ruchem jednostajnie zmiennym.
W ten sposób poruszają się spadające lub rzucone przedmioty. Takim ruchem (choć o innej wartości przyspieszenia) zjeżdżają po zboczu góry o stałym nachyleniu pojazdy, gdy nie występuje hamowanie i wszelkie opory są pomijalnie małe. Podobnie porusza się kula karabinowa lub strzała z łuku, jeśli opory powietrza można zaniedbać. Tak zachowuje się strumień wody wyrzucany pod ciśnieniem. W dalszej części kursu fizyki zobaczymy, że w ten sposób poruszają się również ładunki elektryczne w jednorodnym polu elektrycznym.
Kierunek wektora przyspieszenia ciała może być dowolny. W celu sprecyzowania naszych dalszych rozważań przyjmijmy, że przyspieszenie skierowane jest wzdłuż osi \( Y \) (Rysunek 2.6.1). W chwili, gdy rozpoczynamy obserwację, punkt materialny znajduje się w określonym punkcie przestrzeni, który określamy przez podanie jego współrzędnych. Może się już poruszać, czyli należy mu przypisać pewien wektor prędkości początkowej. Dwa wektory: przyspieszenia i prędkości początkowej wyznaczają płaszczyznę ruchu. Dobierzmy kierunki osi układu współrzędnych tak, aby była to np. płaszczyzna \( (X, Y) \). Wówczas, składowe prędkości i położenia wzdłuż osi \( Z \) w początkowej chwili \( t = 0 \) są równe zeru.
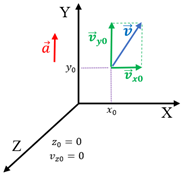
Rysunek 2.6.1. Relacje kinematyczne w ruchu jednostajnie przyspieszonym
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. Oś X wskazuje godzinę trzecią, oś Y wskazuje godzinę dwunastą, oś Z wskazuje godzinę siódmą. W płaszczyźnie XY został wybrany punkt o współrzędnych x _0 i y _0. W tym punkcie zostały zaczepione trzy wektory: wektor prędkości v wskazujący godzinę pierwszą oraz składowe v _x _ równoległa do osi X i v _y _0 równoległa do osi Y. Wektor a ma ten sam kierunek i zwrot jak oś Y.}
Warunki początkowe ruchu (dla \( t = 0 \)) w układzie współrzędnych prostokątnych określamy w następujący sposób:
{Wektor przyspieszenia a jest równy sumie iloczynów zero i wersora i, wartość przyspieszenia a i wersora j oraz zero i wersora k, a to się równa iloczynowi wartości przyspieszenia a i wersora j, co można zapisać jako wektor o współrzędnych zero, a, zero.}
{Wektor prędkości v jest równy sumie iloczynów współrzędnych prędkości początkowej v _x _0, v _y _0 i zero przez odpowiadające im wersory i, j, k. To się z kolei równa sumie iloczynów współrzędnej prędkości v _x _0 razy wersor i oraz współrzędnej prędkości v _y _0 razy wersor j, co można zapisać jako wektor o współrzędnych v _x _0, v _y _0, zero.}
{Wektor położenia r jest równy sumie iloczynów współrzędnej x _0 i wersora i oraz współrzędnej y _0 i wersora j oraz zero i wersora k. To się z kolei równa sumie iloczynów współrzędnej prędkości x _0 i wersora i oraz współrzędnej prędkości y _0 i wersora j, co można zapisać jako wektor o współrzędnych x _0, y _0, zero.}
W rozpatrywanym przez nas ruchu wektor przyspieszenia nie zmienia się w czasie. Pamiętając, że przyspieszenie jest pochodną prędkości względem czasu, możemy wyznaczyć prędkość wykonując operację odwrotną do różniczkowania, czyli całkując przyspieszenie po czasie. Zapiszmy relacje dla poszczególnych składowych
{współrzędna przyspieszenia a _x jest równa pochodnej współrzędnej prędkości v _x względem czasu t. Z tego wynika, że współrzędna prędkości v _x jest stała i równa początkowej współrzędnej prędkości v _x _0};
{współrzędna przyspieszenia a _y jest równa pochodnej współrzędnej prędkości v _y względem czasu t. Z tego wynika, że współrzędna prędkości v _y jest równa sumie iloczynu wartości przyspieszenia a przez czas t oraz współrzędnej prędkości v _y _0}
{współrzędna przyspieszenia a _z jest równa pochodnej współrzędnej prędkości v _z względem czasu t. Z tego wynika, że współrzędna prędkości v _z jest stała i równa zero}
Podobnie wyznaczamy współrzędne wektora położenia pamiętając, że prędkość jest pochodną położenia względem czasu.
{współrzędna prędkości v _x jest równa pochodnej współrzędnej x względem czasu t. Z tego wynika, że współrzędna x jest równa sumie iloczynu początkowej współrzędnej prędkości v _x _0 przez czas oraz początkowej współrzędnej x _0}
{współrzędna prędkości v _y jest równa pochodnej współrzędnej y względem czasu t. Z tego wynika, że współrzędna y jest równa sumie połowy iloczynu wartości przyspieszenia a przez kwadrat czasu t, iloczynu początkowej współrzędnej prędkości v _y _0 przez czas oraz początkowej współrzędnej y _0}
{Współrzędna prędkości v _z jest równa pochodnej współrzędnej z względem czasu t. Z tego wynika, że współrzędna z jest równa zeru.}
W ten sposób mamy wyznaczone wektory prędkości i położenia dla dowolnej chwili naszego ruchu. Zależności wektorów położenia od czasu noszą nazwę równań ruchu. Wzory te są też równaniami toru poruszającego się ciała zapisanymi w postaci parametrycznej, gdzie parametrem jest czas. Zauważamy, że w naszym przypadku ruch odbywa się wyłącznie w płaszczyźnie \( (X, Y) \). Nazywamy go ruchem płaskim. Możemy łatwo zapisać równanie toru ciała w postaci bezpośredniej zależności \( y = f(x) \). Zapis taki uzyskamy wyznaczając czas ze wzoru na \( x \):
{Czas t jest równy ilorazowi różnicy współrzędnej x i początkowej współrzędnej x _0 przez początkową współrzędną prędkości v _x _0}
i wstawiając do równania (2.6.8) otrzymujemy:
{Współrzędna y jest równa sumie połowy iloczynu wartości przyspieszenia a i kwadratu ilorazu różnicy współrzędnej x i początkowej współrzędnej x _0 przez początkową współrzędną prędkości v _x _0 oraz iloczynu początkowej współrzędnej prędkości v _y _0 oraz ilorazu różnicy współrzędnej x i początkowej współrzędnej x _0 przez początkową współrzędną prędkości vx0 oraz początkowej współrzędnej y _0}
W uzyskanej zależności bez trudu rozpoznajemy równanie paraboli.
Rysunek 2.6.2 przedstawia graficzną prezentację rozpatrywanego przez nas ruchu z wyszczególnieniem podstawowych symboli i zależności. W tym przypadku wektor przyspieszenia skierowany jest w stronę przeciwną niż składowa \( v_{y0} \) wektora prędkości. Tor na rysunku odpowiada przypadkowi rzutu ukośnego i może być uznany np. za tor pocisku armatniego w idealnym przypadku braku oporów ruchu.
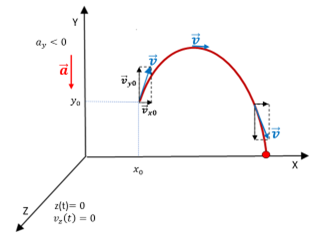
Rysunek 2.6.2. Kinematyka rzutu ukośnego.
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. Oś X wskazuje godzinę trzecią, oś Y wskazuje godzinę dwunastą, oś Z wskazuje godzinę siódmą. W płaszczyźnie XY został wybrany punkt o współrzędnych x _0 i y _0. W tym punkcie zostały zaczepione trzy wektory: wektor prędkości v wskazujący godzinę pierwszą oraz składowe v _x _0 równoległa do osi X i v _y _0 równoległa do osi Y. Wektor v jest styczny do toru, który ma kształt paraboli o ramionach skierowanych w dół. W wierzchołu paraboli jest zaczepiony inny wektor v równoległy do osi X o długości równej długości wektora vx0. W punkcie o współrzędnej y_0 położonym na drugim ramieniu paraboli zaczepiony jest trzeci wektor v wskazujący godzinę piątą i jego składowe. Wektor a jest równoległy do osi Y, lecz ma zwrot przeciwny. Powyżej wektora a umieszczony jest napis a _y jest mniejsze od zera. Obok osi Z znajduje się napis z jako funkcja t jest równe zeru oraz v _z jako funkcja t jest równe zeru}
{Składowa prędkości v _x jako funkcja t jest równa składowej prędkości poczatkowej v _x _0}
{Współrzędna x jako funkcja czasu t jest równa sumie współrzędnej x _0 oraz iloczynu składowej początkowej v _x _0 i czasu t}
{Składowa prędkości v _y jako funkcja t jest równa sumie składowej prędkości poczatkowej v _y _0 oraz ilczynu składowej przyspieszenia a _y i czasu t}
{Współrzędna y jako funkcja czasu t jest równa sumie współrzędnej y _0, iloczynu składowej początkowej v _y _0 i czasu t oraz iloczynu składowej przyspieszenia a _y przez połowę kwadratu czasu t}
6.1. Ilustracja graficzna - test
Ilustracja graficzna - test
Wszystko, co zostało wcześniej opisane za pomocą definicji i wzorów, znajduje żywe odzwierciedlenie w otaczającej nas rzeczywistości. Teraz sprawdź, czy rozumiesz znaczenie poszczególnych pojęć i wzorów.
Dla przykładu - wyznacz przy założonych przez siebie warunkach początkowych:
1. czas, po którym ciało wystrzelone do góry z określoną prędkością osiągnie największą wysokość,
2. wartość tej wysokości wyrażoną w metrach,
3. zasięg lotu ciała wystrzelonego pod danym kątem do poziomu,
4. kąt, dla którego zasięg będzie największy
5. całkowity czas lotu wystrzelonego pod danym kątem pocisku,
6. prędkość pocisku w najwyższym punkcie oraz w momencie uderzenia o ziemię,
7. prędkość wyrzucanej pionowo wody w słynnej fontannie na jeziorze genewskim, gdzie wysokość słupa wody osiąga 130 m,
8. masę wody utrzymującej się w powietrzu wiedząc, że fontanna na jeziorze genewskim wyrzuca 500 litrów wody na sekundę.
A teraz, wyniki swych obliczeń możesz sprawdzić wykonując modelowanie ruchu jednostajnie przyspieszonego za pomocą interaktywnej ilustracji graficznej. Rysunek poniżej prezentuje przykładowy wykres.
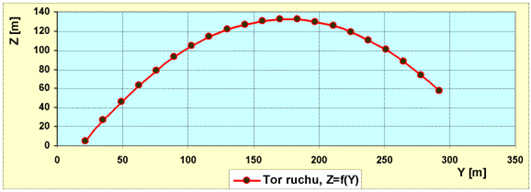
Rysunek 2.6.1.1. Ruch jednostajnie przyspieszony
{Na rysunku została przedstawiona pierwsza ćwiartka prostokątnego układu współrzędnych X Y. Na osi X zostało zaznaczonych kilka wartości od 0 do 350 metrów, co 50 metrów. Na osi Y zostało zaznaczonych kilka wartości od 0 do 140 metrów, co 20 metrów. Tor ruchu ma kształt paraboli, której ramiona są skierowane do dołu.}
Domowe Laboratorium Fizyczne
Sprawdzenie czy trajektoria rzutu ukośnego ma rzeczywiście kształt paraboli może być trudne, bowiem zwykle rzucony przedmiot nie pozostawia śladu. W naszym domowym laboratorium rolę wyrzucanych w sposób ciągły przedmiotów odgrywa strumień wody w łazience.
- Zaobserwuj dla jakiego kąta względem poziomu zasięg strumienia wody jest największy.
- Oszacuj prędkość strumienia wody wiedząc, że wysokość kafelka wynosi 15 cm.
7. Transformacja Galileusza
Transformacja Galileusza
Opis ruchu punktu materialnego zależy od wyboru układu odniesienia. Jak zmieniają się współrzędne punktu, gdy przechodzimy z jednego układu do innego? Rozpatrzmy najprostszy przypadek. Układ ruchomy \( (X'Y'Z') \) {x prim, y prim, z prim} porusza się względem układu nieruchomego \( (XYZ) \) {X Y Z} ruchem jednostajnym prostoliniowym z prędkością \( \vec{v_u}=[v_u;0;0] \) {Wektor prędkości v _u o współrzędnych v _u, 0, 0} wzdłuż osi \( X \), która pokrywa się z osią \( X' \) {X prim}.
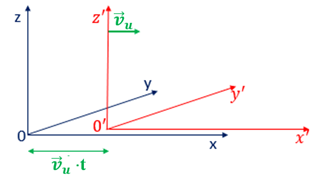
Rysunek 2.7.1. Układ ruchomy porusza się ruchem jednostajnym i prostoliniowym wzdłuż osi X
{Na rysunku zostały przedstawione dwa układy współrzędnych kartezjańskich o osiach X, Y, Z oraz o osiach X prim, Y prim, Z prim. Odpowiednie osie X i X prim, Y i Y prim oraz Z i Z prim są wzajemnie równoległe. Osie X i X prim wskazują godzinę trzecią. Osie Y i Y prim wskazują godzinę drugą. Osie Z i Z prim wskazują godzinę dwunastą. Odległość początku układu 0 prim od początku 0 jest równa iloczynowi prędkości v _u przez czas t. Wektor prędkości v _u z jaką układ X prim Y prim Z prim porusza się względem układu X Y Z jest równoległy do osi X i X prim i ma zwrot taki sam jak te osie.}
Jeśli punkt porusza się w układzie ruchomym z prędkością \( \vec{v'}=[v_{x^\prime};\ v_{y^\prime};\ v_{z^\prime}] \) {Wektor prędkości v prim o współrzędnych v _x prim,, v _y prim i v _z prim}, to jego prędkość \( \vec{v}=[v_x;\ v_y;\ v_z] \) {Wektor prędkości v o współrzędnych v _x,, v _y i v _z} w układzie nieruchomym wynosi: \( v_x=v_{x^\prime}+v_u \); \( v_y=v_{y^\prime} \); \( v_z=v_{z^\prime} \)
{Składowa prędkości v _x jest równa sumie składowej prędkości v _x prim i prędkości v _u. Składowa prędkości v _y jest równa składowej prędkości v _y prim. Składowa prędkości v _z jest równa składowej prędkości v _z prim}
Współrzędne punktu w układzie nieruchomym \( (x, y, z) \) związane są ze współrzędnymi w układzie poruszającym się \( (x', y', z') \){x prim, y prim, z prim} wzorami:
{Współrzędna x jest równa sumie współrzędnej x prim oraz iloczynu prędkości v _u przez czas t. Współrzędna y jest równa współrzędnej y prim. Współrzędna z jest równa współrzędnej z prim. Czas t jest równy czasowi t prim}
Ostatnia z równości wyraża założenie o równości upływu czasu w różnych układach odniesienia. Do tego zagadnienia powrócimy jeszcze przy omawianiu ruchów z prędkościami bliskimi prędkości światła.
Transformacja odwrotna, tj. wyrażenie współrzędnych punktu w układzie ruchomym przez jego współrzędne w układzie nieruchomym, określona jest wzorami:
{Współrzędna x prim jest równa różnicy współrzędnej x oraz iloczynu prędkości v _u przez czas t. Współrzędna y prim jest równa współrzędnej y. Współrzędna z prim jest równa współrzędnej z. Współrzędna t prim jest równa czasowi t}
Zależności te stanowią treść tzw. transformacji Galileusza wiążącej współrzędne punktu w dwóch układach odniesienia, z których jeden jest nieruchomy, a drugi porusza się względem niego ze stałą prędkością w kierunku, zgodnym ze zwrotami osi \( X \) i \( X' \), gdy osie obu układów są wzajemnie równoległe.
Przykładem transformacji Galileusza w praktyce jest poruszający się ruchem jednostajnym, prostoliniowym wagon, statek lub samolot, których ruch względem ziemi dodaje się do naszego ruchu wewnątrz nich. Klasycznym przykładem są też ruchome schody.
8. Zadania
W kolejnych podrozdziałach znajdują się zadania z rozwiązaniami.
8.1. Zadanie 1 (współrzędne kartezjańskie)
Zadanie 1 (współrzędne kartezjańskie)
Ruch plamki na ekranie oscyloskopu, w układzie kartezjańskim w płaszczyźnie \( XY \), opisuje wektor położenia.
\( \vec{r}\left(t\right)=\left[A\cdot c o s\left(\omega \cdot t\right);B \cdot s i n\left(\omega\cdot t\right)\right] \)
{Wektor położenia r w chwili czasu t> ma pierwszą współrzędną równą iloczynowi stałej A i cosinusa iloczynu omegi przez czas t. Druga współrzędna jest równa iloczynowi stałej B i sinusa iloczynu omegi przez czas t}
gdzie \( A \),
\( B \),
\( \omega \) {omega} to stałe dodatnie, natomiast \( t \) - czas.
Znaleźć:
a) równanie toru plamki,
b) równanie krzywej po której będzie poruszać się plamka w przypadku, gdy \( B = A \),
c) wektor prędkości,
d) wektor przyspieszenia.
Rozwiązanie:
Z treści zadania wynika, że \( x\left(t\right)=A\cdot cos\left(\omega \cdot t\right) \) oraz \( y\left(t\right)=B\cdot sin\left(\omega \cdot t\right) \)
{Współrzędna x w chwili czasu t jest równa iloczynowi stałej A i cosinusa z iloczynu omegi przez czas t oraz współrzędna y w chwili czasu t jest równa iloczynowi stałej B i sinusa iloczynu omegi przez czas t}
a) Równie toru otrzymujemy eliminując czas z powyższych równań ruchu, podnosząc oba równania do kwadratu i dodając stronami.
Ponieważ
{Iloraz kwadratu współrzędnej x przez kwadrat A równa się kwadratowi cosinusa iloczynu omegi i czasu t}
oraz
\( \frac{y^2}{B^2}={sin}^2\left(\omega \cdot t\right) \)
{Iloraz kwadratu współrzędnej y przez kwadrat B równa się kwadratowi sinusa iloczynu omegi i czasu t}
to
\( \frac{x^2}{A^2}+\frac{y^2}{B^2}=cos^2\left(\omega \cdot t\right)+{sin}^2\left(\omega \cdot t\right) \)
{Suma ilorazów kwadratu x przez kwadrat A i kwadratu y przez kwadrat B jest równa sumie kwadratu cosinusa iloczynu omegi i czasu t oraz kwadratu sinusa z iloczynu omegi i czasu t}
czyli ruch odbywa się po elipsie o równaniu:
\( \frac{x^2}{A^2}+\frac{y^2}{B^2}=1 \)
{Suma ilorazów kwadratu x przez kwadrat A i kwadratu y przez kwadrat B jest równa 1}
b) W przypadku szczególnym, gdy \( B = A \), ruch odbywa się po okręgu o równaniu:
\( x^2+y^2=A^2 \)
{Suma kwadratów x i y jest równa kwadratowi A}
c) Z definicji wektora prędkości, w tym ruchu:
\( \vec{v}\left(t\right)=\left[\frac{dx}{dt};\frac{dy}{dt}\right]=\left[-A \cdot \omega \cdot s i n\left(\omega \cdot t\right);B\cdot\omega \cdot c o s\left(\omega \cdot t\right)\right] \)
{wektor prędkości v w chwili czasu t jest równy wektorowi o pierwszej współrzędnej równej pochodnej współrzędnej x względem czasu t i drugiej współrzędnej równej pochodnej współrzędnej y względem czasu. To z kolei jest równe wektorowi o pierwszej współrzędnej równej minus iloczyn A, omegi i sinusa iloczynu omegi i czasu t. Druga współrzędna jest równa iloczynowi B, omegi i cosinusa iloczynu omegi i czasu t}
d) Z definicji wektora przyspieszenia, w tym ruchu,
\( \vec{a}\left(t\right)=\left[\frac{dv_x}{dt};\frac{dv_y}{dt}\right]=\left[-A\cdot\omega^2\cdot c o s\left(\omega\cdot t\right);-B\cdot\omega^2\cdot s i n\left(\omega\cdot t\right)\right] \)
{wektor przyspieszenia a w chwili czasu t jest równy wektorowi o pierwszej współrzędnej równej pochodnej składowej prędkości v _x względem czasu t i drugiej współrzędnej równej pochodnej składowej prędkości v _y względem czasu. To z kolei jest równe wektorowi o pierwszej współrzędnej równej minus iloczyn A i kwadratu omegi pomnożonemu przez cosinus iloczynu omegi i czasu t. Druga współrzędna jest równa minus iloczyn B i kwadratu omegi pomnożonemu przez sinus iloczynu omegi i czasu t}
8.2. Zadanie 2 (zasada niezależności ruchów)
Zadanie 2 (zasada niezależności ruchów)
Łódź przepływa w poprzek rzekę ze stałą względem wody prędkością \( v_y \), prostopadłą do kierunku prądu rzeki. Prędkość wody w rzece jest stała i równa \( v_x \). Szerokość rzeki \( D \).
Znaleźć:
a) wektor prędkości łodzi w układzie odniesienia związanym z brzegiem,
b) równanie toru łodzi,
c) odległość \( s \), o którą prąd rzeki znosi łódź od miejsca startu do miejsca przybicia na przeciwległym brzegu.
Rozwiązanie:
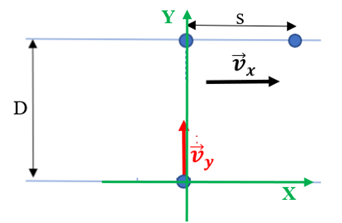
{Brzegi rzeki zostały zaznaczone dwiema prostymi równoległymi, między którymi odległość wynosi D. Proste wskazują godzinę trzecią. Oś X dwuwymiarowego układu współrzędnych prostokątnych pokrywa się z dolną prostą. Oś Y jest prostopadła do obu prostych. Na dolnej prostej został zaznaczony punkt, który jest początkiem układu współrzędnych. Na górnej prostej zostały zaznaczone dwa punkty: jeden jest punktem przecięcia osi Y z tą prostą, drugi znajduje się w odległości s od niego z jego prawej strony. W punkcie będącym początkiem układu współrzędnych zaczepiony został wektor v _y, który leży na osi Y i ma ten sam zwrot co oś. Powyżej osi X, pomiędzy prostymi równoległymi znajduje się wektor v _x, równoległy do osi X i tym samym zwrocie co oś X.}
a) Początek układu współrzędnych kartezjańskich (punkt 0,0) umieszczamy w miejscu startu łodzi. Daje to warunki początkowe, dla czasu \( t=0 \), \( x(0)=0 \) i \( y(0)=0 \) {czas t jest równy zero, współrzędna x dla chwili czasu równej zero jest równa zero i współrzędna y dla chwili czasu równej zero jest równa zero}. Wektor prędkości:
\( \vec{v}\left(t\right)=\left[v_x;v_y\right] \)
{Pierwsza współrzędna wektora prędkości v w chwili czasu t jest równa v _x, a druga współrzędna jest równa v _y}
b) Ruch łodzi w poprzek rzeki wynika ze złożenia dwóch niezależnych ruchów, w kierunku osi \( OX \) z prędkością wody w rzece \( v_x \) i osi \( OY \) ze stałą prędkością \( v_y \).
Możemy zapisać równania ruchu w kierunku osi \( OY \):
\( y\left(t\right)=v_y·t \)
{Współrzędna y w chwili czasu t jest równa iloczynowi prędkości v _y i czasu t}
oraz w kierunku osi \( OX \):
\( y=\frac{v_y}{v_x}·x \)
{Współrzędna x w chwili czasu t jest równa iloczynowi prędkości v _x i czasu t}
Eliminując z powyższych równań ruchu czas otrzymujemy równanie toru:
\( y=\frac{v_y}{v_x}·x \)
{Współrzędna y jest równa iloczynowi ilorazu prędkości v _y przez prędkość v _x razy współrzędna x}
Ponieważ prędkości \( v_x \) i \( v_y \) są stałe, torem ruchu łodzi jest linia prosta.
c) Gdy współrzędna \( y = D \), to współrzędna \( x = s \), dlatego
\( s=\frac{v_x}{v_y}·D \)
{Odległość s jest równa iloczynowi ilorazu prędkości v _x przez prędkość v _y razy szerokość rzeki D}
8.3. Zadanie 3 (zasada niezależności ruchów)
Zadanie 3 (zasada niezależności ruchów)
Chłopiec, który przeprawia się przez rzekę o szerokości \( D \);wypływa z punktu \( A \) i przez cały czas ustawia kajak pod kątem \( \alpha \) względem brzegu. Wyznacz prędkość kajaka względem
wody, jeżeli prędkość wody w rzece jest stała i równa \( v_s \), a kajak zniosło na odległość
\( s \).
a ) poniżej (w dół rzeki) punktu \( B \), który znajduje się dokładnie naprzeciw punktu \( A \), jeśli kajak płynie ukośnie pod prąd.
b ) poniżej (w dół rzeki) punktu \( B \), który znajduje się dokładnie naprzeciw punktu \( A \), jeśli kajak płynie ukośnie z prądem.
c ) powyżej (w górę rzeki) punktu \( B \), który znajduje się dokładnie naprzeciw punktu \( A \). Kajak płynie ukośnie pod prąd.
Rozwiązanie:
a ) Początek układu współrzędnych kartezjańskich (punkt 0,0) umieszczamy w miejscu startu kajaka (punkt \( (0, 0) \). Daje to warunki początkowe, dla czasu \( t = 0 \), \( x(0) = 0 \) i \( y(0) = 0 \)
Oznaczmy nieznaną prędkość kajaka względem wody przez \( \vec{vk} \). Rozłóżmy tę prędkość na składowe \( v_{kx} \) i \( v_{ky} \).
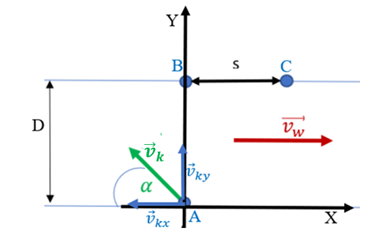
{Brzegi rzeki zostały zaznaczone dwiema prostymi równoległymi, między którymi odległość wynosi D. Proste wskazują godzinę trzecią. Oś X dwuwymiarowego układu współrzędnych prostokątnych pokrywa się z dolną prostą i wskazuje godzinę trzecią. Oś Y jest prostopadła do obu prostych i wskazuje godzinę dwunastą. Na dolnej prostej został zaznaczony punkt A, który jest początkiem układu współrzędnych. Na górnej prostej zostały zaznaczone dwa punkty: punkt B jest punktem przecięcia osi Y z tą prostą, punkt C znajduje się w odległości s od punktu B z prawej jego strony. W punkcie A będącym początkiem układu współrzędnych zaczepiony został wektor v _k, który wskazuje godzinę jedenastą. Wektor v _k został rozłożony na składowe – dwa wektory zaczepione w punkcie A, z których jeden v _k _x wskazuje godzinę dziewiątą, a drugi v _k _y wskazuje godzinę dwunastą. Między wektorami v _k _x i v _k został zaznaczony kąt alfa, Powyżej osi X, pomiędzy prostymi równoległymi znajduje się wektor v _w, równoległy do osi X i tym samym zwrocie co oś, wskazujący godzinę trzecią.}
Wówczas
wektor prędkości kajaka
\( \vec{v}\left(t\right)=\left[v_w-v_{kx};v_{ky}\right] \)
{Pierwsza współrzędna wektora prędkości v _w chwili czasu t jest różnicą prędkości v _w i składowej prędkości kajaka v _k _x. Druga współrzędna jest równa składowej prędkości v _k _y}
Ruch kajaka wynika z nałożenia się dwóch niezależnych ruchów, w kierunku osi \( OX \) z prędkością wody w rzece \( v_w \) i składowej prędkości kajaka\( v_{kx} \) oraz w kierunku osi \( OY \) ze stałą prędkością \( v_{ky} \).
Możemy zapisać równania ruchu w kierunku osi \( OY \):
\( y\left(t\right)=v_{ky}·t \)
{Współrzędna y w chwili czasu t jest równa iloczynowi prędkości v _k _y i czasu t}
oraz w kierunku osi \( OX \):
\( x\left(t\right)=\left(v_w-v_{kx}\right)·t \)
{Współrzędna x w chwili czasu t jest równa iloczynowi różnicy prędkości wody v _w i składowej prędkości kajaka v _k _x przez czas t}
gdzie \( v_{ky}=v_k\cdot\sin{\alpha} \), \( v_{kx}=v_k\cdot\cos{\alpha} \)
{Składowa prędkości v _k _y jest równa iloczynowi prędkości kajaka v _k przez sinus kąta alfa. Składowa prędkości kajaka v _k _x jest równa iloczynowi prędkości kajaka v _k przez cosinus kąta alfa.}
Eliminując z powyższych równań ruchu czas otrzymujemy równanie toru:
\( y=\frac{v_{ky}}{\left(v_w-v_{kx}\right)}\cdot x \)
{Współrzędna y jest równa ilorazowi składowej prędkości kajaka v _k _y przez różnicę prędkości wody v _w i prędkości kajaka v _k _x pomnożonemu przez x}
Gdy współrzędna \( y = D \), to współrzędna \( x = s \), stąd
\( D=\frac{v_{ky}}{\left(v_w-v_{kx}\right)}\cdot s \)
{Szerokość rzeki D jest równa ilorazowi składowej prędkości v _k _y przez różnicę prędkości wody v _w i składowej prędkości kajaka v _k _x pomnożonemu przez s}
Po podstawieniu \( v_{kx} \) i \( v_{ky} \) otrzymujemy:
\( D = \frac{s \cdot v_k sin \alpha}{v_w-v_k \cdot cos \alpha} \)
{Szerokość rzeki D jest równa ilorazowi iloczynu s ; prędkości kajaka v _k i sinusa kąta alfa przez różnicę prędkości wody v _w i prędkości kajaka v _k pomnożonej przez cosinus kąta alfa}
Stąd po przekształceniach znajdujemy prędkość kajaka względem wody
\( v_k=\frac{D{\cdot v}_w}{s \cdot \sin{\alpha}+D \cdot \cos{\alpha}}\)
{Prędkość kajaka v _k jest równa ilorazowi iloczynu szerokości rzeki D i prędkości wody v _w przez sumę odległości s pomnożoną przez sinus kąta alfa i szerokości rzeki D pomnożonej przez cosinus kąta alfa}
b) Zadanie rozwiązujemy podobnie jak w punkcie a)
Zmienia się wektor prędkości kajaka
\( \vec{v}\left(t\right)=\left[v_w+v_{kx};v_{ky}\right] \)
{Wektor prędkości v _w chwili czasu t ma pierwszą współrzędną równą sumie prędkości v _w i v _k _x. Druga współrzędna jest równa v _k _y}
oraz równanie ruchu w kierunku osi \( OX \):
\( x\left(t\right)=\left(v_w+v_{kx}\right)·t \)
{Współrzędna x w chwili czasu t jest równa iloczynowi sumy prędkości wody v _w i prędkości składowej kajaka v _k _x przez czas t}
Równanie ruchu w kierunku osi \( OY \) pozostaje takie samo.
c) Zadanie rozwiązujemy podobnie jak w punkcie a)
W tym przypadku wektor prędkości kajaka oraz równania ruchu pozostają takie same.
Zmienia się jedynie warunek dotyczący punktu docelowego: gdy współrzędna \( y = D \) {współrzędna y równa się D}, to współrzędna \( x = -s \) {współrzędna x równa się minus s}.
8.4. Zadanie 4 (spadek swobodny w windzie)
Zadanie 4 (spadek swobodny w windzie)
Winda porusza się ruchem jednostajnie zmiennym do góry \( a_w \lt g \) {przyspieszenie a_w jest mniejsze od przyspieszenia ziemskiego g}. W chwili, gdy winda ma prędkość \( v_w \) i jej podłoga znajduje się na wysokości \( s \) nad ziemią z sufitu odrywa się żarówka. Winda ma wysokość \( H \). Po jakim czasie żarówka upadnie na podłogę, jeśli
a) winda porusza się do góry z przyspieszeniem \( a_w < g \).
b) winda porusza się do góry z opóźnieniem \( a_w < g \).
c) winda porusza się w dół z przyspieszeniem \( a_w < g \).
d) winda porusza się w dół z opóźnieniem \( a_w < g \).
Rozwiązanie:
a)
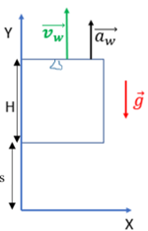
{Na rysunku przedstawiony został dwuwymiarowy układ współrzędnych kartezjańskich X Y, którego oś X wskazuje godzinę trzecią, a oś Y wskazuje godzinę dwunastą. Prostokąt obrazujący windę jest położony w ten sposób, że dwa jego boki o długości H są równoległe do osi Y, przy czym jeden z nich leży na osi. Dwa pozostałe boki o nieokreślonej długości są równoległe do osi X, przy czym położone są w odległościach s i s + H. Do sufitu windy zaczepione są dwa równoległe wektory v _w i a _w wskazujące godzinę dwunastą. Obok prostokąta po jego prawej stronie znajduje się wektor g, wskazujący godzinę szóstą.}
Zapiszmy równania ruchu żarówki i podłogi windy. Zauważ, że wystarczy napisać tylko równania dla współrzędnej \( y \).
Dla podłogi windy:
\( y_w\left(t\right)=s+v_w\cdot t+\frac{a_w\cdot t^2}{2} \)
{Współrzędna windy y _w w chwili czasu t jest równa sumie wysokości s, iloczynu prędkości v _w i czasowi t oraz połowy iloczynu przyspieszenia a _w i kwadratu czasu t}
Dla żarówki:
\( y_ż(t) = s + H + v_w \cdot t - \frac{g \cdot t^2 }{2} \)
{Współrzędna żarówki y _ż w chwili czasu t jest równe sumie wysokości s, wysokości H oraz iloczynu prędkości v _w przez czas t oraz połowy iloczynu przyspieszenia a _w i kwadratu czasu t}
W chwili, gdy żarówka dotknie podłogi windy, współrzędne \( y_w\left(t\right)\ i\ y_ż(t) \) muszą być sobie równe.
\( y_w(t)= y_ż(t) \)
{Współrzędna windy y _w dla chwili czasu t jest równa współrzędnej y _ż w chwili czasu t}
Stąd:
\( s+v_w\cdot t+\frac{a_w\cdot t^2}{2}=\ s+H+v_w\cdot t-\frac{g\cdot t^2}{2} \)
{Suma wysokości s, iloczynu prędkości windy v _w i czasu t oraz połowy iloczynu przyspieszenia a _w i kwadratu czasu t jest równa sumie wysokości s, wysokości H oraz iloczynu prędkości windy v _w i czasu t odjąć połowę iloczynu przyspieszenia ziemskiego g i kwadratu czasu t}
Wykonując przekształcenia otrzymujemy:
\( t=\sqrt{\frac{2\cdot H}{g+a_w}} \)
{Czas t jest równy pierwiastkowi kwadratowemu z ilorazu podwojonej wysokości H przez sumę przyspieszenia ziemskiego g i przyspieszenia windy a z indeksem w}
Pozostałe przypadki b), c) i d) proszę rozwiązać samodzielnie.
Odpowiedzi:
b) \( t=\sqrt{\frac{2\cdot H}{g-a_w}} \)
{Czas t jest równy pierwiastkowi kwadratowemu z ilorazu podwojonej wysokości H przez różnicę przyspieszenia ziemskiego g i przyspieszenia windy a _w}
c)
\(t=\sqrt{\frac{2\cdot H}{g+a_w}} \){Czas t jest równy pierwiastkowi kwadratowemu z ilorazu podwojonej wysokości H przez sumę przyspieszenia ziemskiego g i przyspieszenia windy a _w}
c) \( t=\sqrt{\frac{2\cdot H}{g-a_w}} \)
{Czas t jest równy pierwiastkowi kwadratowemu z ilorazu podwojonej wysokości H przez różnicę przyspieszenia ziemskiego g i przyspieszenia windy a _w}
8.5. Zadanie 5 (rzut ukośny z samolotu)
Zadanie 5 (rzut ukośny z samolotu)
Samolot leci z prędkością \( v_s \) na stałej wysokości h nad ziemią. W pewnej chwili zostaje z niego wystrzelony pocisk ukośnie do góry pod kątem \( \alpha \) do poziomu z prędkością \( v_p \) względem samolotu przeciwnie do jego ruchu.
a) Napisać równania ruchu pocisku,
b) Wyprowadzić równanie toru pocisku,
c) Znaleźć czas po jakim pocisk spadnie na ziemię,
d) Znaleźć miejsce upadku pocisku,
e) Znaleźć maksymalną wysokość na jaką wzniósł się pocisk
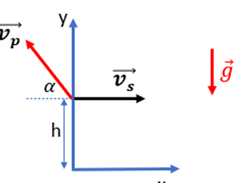
{Na rysunku przedstawiony został dwuwymiarowy układ współrzędnych kartezjańskich X Y, którego oś X wskazuje godzinę trzecią, a oś Y wskazuje godzinę dwunastą. W punkcie znajdującym się na osi Y w odległości h od początku układu współrzędnych zostały zaczepione dwa wektory: v _s wskazujący godzinę trzecią oraz v _p wskazujący godzinę jedenastą. Kąt między wektorem v _p a poziomem został oznaczony alfa. Po prawej stronie osi Y znajduje się wektor g, wskazujący godzinę szóstą.}
Wskazówki ułatwiające rozwiązanie:
a) Rozłóż prędkość pocisku na składowe i zapisz równania dla współrzędnej \( x \) i \( y \) pocisku. Pamiętaj o tym, aby uwzględnić prędkość samolotu.
b) Z równania dla współrzędnej \( x \) wyznacz czas \( t \) i podstaw go do równania dla współrzędnej \( y \)
c) W chwili uderzenia w ziemię współrzędna \( y \) jest równa zero: \( y(t) = 0 \)
d) Sposób 1: do równania na \( x(t) \) wstaw całkowity czas lotu
Sposób 2: skorzystaj z równania toru i znajdź miejsca zerowe funkcji \( y(t) \)
e) Sposób 1: skorzystaj z równania toru i znajdź współrzędne wierzchołka paraboli
Odpowiedzi:
a) \( x\left(t\right)=(v_s-v_p·cosα)·t \); \( y\left(t\right)=h+v_p·sinα· t-\frac{g·t^2}{2} \)
{Współrzędna x w chwili czasu t jest równa iloczynowi różnicy prędkości samolotu v _s i prędkości pocisku v _p pomnożonej przez cosinus alfa. Współrzędna y w chwili czasu t jest równa różnicy, gdzie odjemną jest suma wysokości h i prędkości pocisku v _p pomnożonej przez sinus alfa i czas t, a odjemnikiem połowa iloczynu przyspieszenia ziemskiego g i kwadratu czasu t}
b) \( y\left(x\right)=h+v_p·sinα· \frac{x}{vs - vp · cosα}- \frac{g·x^2}{2(vs - vp · cosα)^2} \)
{Współrzędna y jako funkcja x jest równa wysokości h plus iloczyn prędkości pocisku v _p, sinusa alfa i ilorazu współrzędnej x przez różnicę prędkości samolotu vs i prędkości pocisku v _p pomnożonej przez cosinus alfa minus połowa iloczynu przyspieszenia ziemskiego g i ilorazu kwadratu współrzędnej x przez kwadrat różnicy prędkości samolotu v _s i prędkości pocisku v _p pomnożonej przez cosinus alfa}
c) \( t = \frac{vp \cdot sinα + \sqrt{vp^2·sin^2α +2·h·g}}{g} \)
{czas t jest równy ilorazowi, w którym dzielną jest suma prędkości pocisku v _p pomnożonej przez sinus kąta alfa i pierwiastka kwadratowego sumy kwadratu prędkości pocisku v _p pomnożonej przez kwadrat sinusa kąta alfa plus podwojony iloczyn wysokości h i przyspieszenia ziemskiego g, a dzielnikiem przyspieszenie ziemskie g}
d) \( x_u=(v_s-v_p·cosα)· \frac{vp \cdot sinα + \sqrt{vp^2·sin^2α +2·h·g}}{g} \)
{Współrzędna x z indeksem u jest równa iloczynowi różnicy prędkości samolotu v _s i prędkości pocisku v _p pomnożonej przez cosinus kąta alfa oraz ilorazu, w którym dzielną jest suma prędkości pocisku v _p pomnożonej przez sinus kąta alfa i pierwiastka kwadratowego sumy kwadratu prędkości pocisku v _p pomnożonej przez kwadrat sinusa kąta alfa plus podwojony iloczyn wysokości h i przyspieszenia ziemskiego g, a dzielnikiem przyspieszenie ziemskie g}
\( y_{max}=h+ \frac{v_p^2 \cdot sin^2α}{2 \cdot g } \)
{Maksymalna wysokość y z indeksem max jest równa sumie wysokości h i ilorazu kwadratu prędkości pocisku v _p pomnożonej przez kwadrat sinusa kąta alfa przez podwojone przyspieszenie ziemskie g}
9. Nowe pojęcia, definicje i wyrażenia
układ odniesienia – punkt w przestrzeni, ciało lub zbiór ciał względem których badamy ruch innych ciałpunkt materialny – ciało, którego rozmiary w badanym ruchu można uznać za pomijalnie małe
ciało sztywne – ciało, które nie ulega odkształceniu w czasie rozpatrywanego ruchu
stan spoczynku – stan kiedy ciało nie zmienia swego położenia względem układu odniesienia
układ współrzędnych – określony w danym układzie odniesienia zespół osi przecinających się w punkcie zwanym początkiem układu i umożliwiający wyznaczenie położenia dowolnego innego punktu w danym układzie
wektor położenia (promień wodzący) – wektor, którego początek znajduje się w początku układu współrzędnych, a koniec określa położenie (współrzędne) danego punktu
układ współrzędnych prostokątnych – układ współrzędnych, w którym położenie punktu określone jest przez podanie wartości rzutów wektora położenia na prostopadłe do siebie osie układu
wersor – wektor o długości jednostkowej
prędkość – pochodna wektora położenia względem czasu
przemieszczenie – różnica wektorów położenia ciała w dwóch różnych chwilach czasu
prędkość średnia – iloraz przebytej drogi przez czas, w którym droga ta została przebyta
przyspieszenie – pochodna wektora prędkości względem czasu
przyspieszenie normalne – składowa przyspieszenia skierowana do środka okręgu określającego lokalny promień krzywizny w danym punkcie
przyspieszenie styczne – składowa przyspieszenia styczna do toru w danym punkcie, czyli skierowana wzdłuż kierunku wektora prędkości w tym punkcie
równanie ruchu – równanie wyrażające zależność położenia ciała w funkcji czasu
równanie toru – równanie określające kształt toru ciała w przestrzeni