2. Kinematyka
7. Transformacja Galileusza
Transformacja Galileusza
Opis ruchu punktu materialnego zależy od wyboru układu odniesienia. Jak zmieniają się współrzędne punktu, gdy przechodzimy z jednego układu do innego? Rozpatrzmy najprostszy przypadek. Układ ruchomy \( (X'Y'Z') \) {x prim, y prim, z prim} porusza się względem układu nieruchomego \( (XYZ) \) {X Y Z} ruchem jednostajnym prostoliniowym z prędkością \( \vec{v_u}=[v_u;0;0] \) {Wektor prędkości v _u o współrzędnych v _u, 0, 0} wzdłuż osi \( X \), która pokrywa się z osią \( X' \) {X prim}.
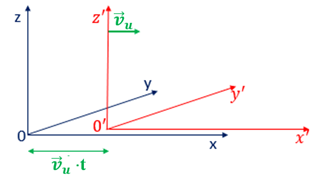
Rysunek 2.7.1. Układ ruchomy porusza się ruchem jednostajnym i prostoliniowym wzdłuż osi X
{Na rysunku zostały przedstawione dwa układy współrzędnych kartezjańskich o osiach X, Y, Z oraz o osiach X prim, Y prim, Z prim. Odpowiednie osie X i X prim, Y i Y prim oraz Z i Z prim są wzajemnie równoległe. Osie X i X prim wskazują godzinę trzecią. Osie Y i Y prim wskazują godzinę drugą. Osie Z i Z prim wskazują godzinę dwunastą. Odległość początku układu 0 prim od początku 0 jest równa iloczynowi prędkości v _u przez czas t. Wektor prędkości v _u z jaką układ X prim Y prim Z prim porusza się względem układu X Y Z jest równoległy do osi X i X prim i ma zwrot taki sam jak te osie.}
Jeśli punkt porusza się w układzie ruchomym z prędkością \( \vec{v'}=[v_{x^\prime};\ v_{y^\prime};\ v_{z^\prime}] \) {Wektor prędkości v prim o współrzędnych v _x prim,, v _y prim i v _z prim}, to jego prędkość \( \vec{v}=[v_x;\ v_y;\ v_z] \) {Wektor prędkości v o współrzędnych v _x,, v _y i v _z} w układzie nieruchomym wynosi: \( v_x=v_{x^\prime}+v_u \); \( v_y=v_{y^\prime} \); \( v_z=v_{z^\prime} \)
{Składowa prędkości v _x jest równa sumie składowej prędkości v _x prim i prędkości v _u. Składowa prędkości v _y jest równa składowej prędkości v _y prim. Składowa prędkości v _z jest równa składowej prędkości v _z prim}
Współrzędne punktu w układzie nieruchomym \( (x, y, z) \) związane są ze współrzędnymi w układzie poruszającym się \( (x', y', z') \){x prim, y prim, z prim} wzorami:
{Współrzędna x jest równa sumie współrzędnej x prim oraz iloczynu prędkości v _u przez czas t. Współrzędna y jest równa współrzędnej y prim. Współrzędna z jest równa współrzędnej z prim. Czas t jest równy czasowi t prim}
Ostatnia z równości wyraża założenie o równości upływu czasu w różnych układach odniesienia. Do tego zagadnienia powrócimy jeszcze przy omawianiu ruchów z prędkościami bliskimi prędkości światła.
Transformacja odwrotna, tj. wyrażenie współrzędnych punktu w układzie ruchomym przez jego współrzędne w układzie nieruchomym, określona jest wzorami:
{Współrzędna x prim jest równa różnicy współrzędnej x oraz iloczynu prędkości v _u przez czas t. Współrzędna y prim jest równa współrzędnej y. Współrzędna z prim jest równa współrzędnej z. Współrzędna t prim jest równa czasowi t}
Zależności te stanowią treść tzw. transformacji Galileusza wiążącej współrzędne punktu w dwóch układach odniesienia, z których jeden jest nieruchomy, a drugi porusza się względem niego ze stałą prędkością w kierunku, zgodnym ze zwrotami osi \( X \) i \( X' \), gdy osie obu układów są wzajemnie równoległe.
Przykładem transformacji Galileusza w praktyce jest poruszający się ruchem jednostajnym, prostoliniowym wagon, statek lub samolot, których ruch względem ziemi dodaje się do naszego ruchu wewnątrz nich. Klasycznym przykładem są też ruchome schody.