2. Kinematyka
6. Przykład ruchu - rzut ukośny
Przykład ruchu - rzut ukośny
Ruch, w którym przyspieszenie zachowuje stałą wartość co do wartości bezwzględnej i kierunku nazywamy ruchem jednostajnie zmiennym.
W ten sposób poruszają się spadające lub rzucone przedmioty. Takim ruchem (choć o innej wartości przyspieszenia) zjeżdżają po zboczu góry o stałym nachyleniu pojazdy, gdy nie występuje hamowanie i wszelkie opory są pomijalnie małe. Podobnie porusza się kula karabinowa lub strzała z łuku, jeśli opory powietrza można zaniedbać. Tak zachowuje się strumień wody wyrzucany pod ciśnieniem. W dalszej części kursu fizyki zobaczymy, że w ten sposób poruszają się również ładunki elektryczne w jednorodnym polu elektrycznym.
Kierunek wektora przyspieszenia ciała może być dowolny. W celu sprecyzowania naszych dalszych rozważań przyjmijmy, że przyspieszenie skierowane jest wzdłuż osi \( Y \) (Rysunek 2.6.1). W chwili, gdy rozpoczynamy obserwację, punkt materialny znajduje się w określonym punkcie przestrzeni, który określamy przez podanie jego współrzędnych. Może się już poruszać, czyli należy mu przypisać pewien wektor prędkości początkowej. Dwa wektory: przyspieszenia i prędkości początkowej wyznaczają płaszczyznę ruchu. Dobierzmy kierunki osi układu współrzędnych tak, aby była to np. płaszczyzna \( (X, Y) \). Wówczas, składowe prędkości i położenia wzdłuż osi \( Z \) w początkowej chwili \( t = 0 \) są równe zeru.
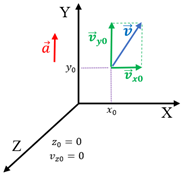
Rysunek 2.6.1. Relacje kinematyczne w ruchu jednostajnie przyspieszonym
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. Oś X wskazuje godzinę trzecią, oś Y wskazuje godzinę dwunastą, oś Z wskazuje godzinę siódmą. W płaszczyźnie XY został wybrany punkt o współrzędnych x _0 i y _0. W tym punkcie zostały zaczepione trzy wektory: wektor prędkości v wskazujący godzinę pierwszą oraz składowe v _x _ równoległa do osi X i v _y _0 równoległa do osi Y. Wektor a ma ten sam kierunek i zwrot jak oś Y.}
Warunki początkowe ruchu (dla \( t = 0 \)) w układzie współrzędnych prostokątnych określamy w następujący sposób:
{Wektor przyspieszenia a jest równy sumie iloczynów zero i wersora i, wartość przyspieszenia a i wersora j oraz zero i wersora k, a to się równa iloczynowi wartości przyspieszenia a i wersora j, co można zapisać jako wektor o współrzędnych zero, a, zero.}
{Wektor prędkości v jest równy sumie iloczynów współrzędnych prędkości początkowej v _x _0, v _y _0 i zero przez odpowiadające im wersory i, j, k. To się z kolei równa sumie iloczynów współrzędnej prędkości v _x _0 razy wersor i oraz współrzędnej prędkości v _y _0 razy wersor j, co można zapisać jako wektor o współrzędnych v _x _0, v _y _0, zero.}
{Wektor położenia r jest równy sumie iloczynów współrzędnej x _0 i wersora i oraz współrzędnej y _0 i wersora j oraz zero i wersora k. To się z kolei równa sumie iloczynów współrzędnej prędkości x _0 i wersora i oraz współrzędnej prędkości y _0 i wersora j, co można zapisać jako wektor o współrzędnych x _0, y _0, zero.}
W rozpatrywanym przez nas ruchu wektor przyspieszenia nie zmienia się w czasie. Pamiętając, że przyspieszenie jest pochodną prędkości względem czasu, możemy wyznaczyć prędkość wykonując operację odwrotną do różniczkowania, czyli całkując przyspieszenie po czasie. Zapiszmy relacje dla poszczególnych składowych
{współrzędna przyspieszenia a _x jest równa pochodnej współrzędnej prędkości v _x względem czasu t. Z tego wynika, że współrzędna prędkości v _x jest stała i równa początkowej współrzędnej prędkości v _x _0};
{współrzędna przyspieszenia a _y jest równa pochodnej współrzędnej prędkości v _y względem czasu t. Z tego wynika, że współrzędna prędkości v _y jest równa sumie iloczynu wartości przyspieszenia a przez czas t oraz współrzędnej prędkości v _y _0}
{współrzędna przyspieszenia a _z jest równa pochodnej współrzędnej prędkości v _z względem czasu t. Z tego wynika, że współrzędna prędkości v _z jest stała i równa zero}
Podobnie wyznaczamy współrzędne wektora położenia pamiętając, że prędkość jest pochodną położenia względem czasu.
{współrzędna prędkości v _x jest równa pochodnej współrzędnej x względem czasu t. Z tego wynika, że współrzędna x jest równa sumie iloczynu początkowej współrzędnej prędkości v _x _0 przez czas oraz początkowej współrzędnej x _0}
{współrzędna prędkości v _y jest równa pochodnej współrzędnej y względem czasu t. Z tego wynika, że współrzędna y jest równa sumie połowy iloczynu wartości przyspieszenia a przez kwadrat czasu t, iloczynu początkowej współrzędnej prędkości v _y _0 przez czas oraz początkowej współrzędnej y _0}
{Współrzędna prędkości v _z jest równa pochodnej współrzędnej z względem czasu t. Z tego wynika, że współrzędna z jest równa zeru.}
W ten sposób mamy wyznaczone wektory prędkości i położenia dla dowolnej chwili naszego ruchu. Zależności wektorów położenia od czasu noszą nazwę równań ruchu. Wzory te są też równaniami toru poruszającego się ciała zapisanymi w postaci parametrycznej, gdzie parametrem jest czas. Zauważamy, że w naszym przypadku ruch odbywa się wyłącznie w płaszczyźnie \( (X, Y) \). Nazywamy go ruchem płaskim. Możemy łatwo zapisać równanie toru ciała w postaci bezpośredniej zależności \( y = f(x) \). Zapis taki uzyskamy wyznaczając czas ze wzoru na \( x \):
{Czas t jest równy ilorazowi różnicy współrzędnej x i początkowej współrzędnej x _0 przez początkową współrzędną prędkości v _x _0}
i wstawiając do równania (2.6.8) otrzymujemy:
{Współrzędna y jest równa sumie połowy iloczynu wartości przyspieszenia a i kwadratu ilorazu różnicy współrzędnej x i początkowej współrzędnej x _0 przez początkową współrzędną prędkości v _x _0 oraz iloczynu początkowej współrzędnej prędkości v _y _0 oraz ilorazu różnicy współrzędnej x i początkowej współrzędnej x _0 przez początkową współrzędną prędkości vx0 oraz początkowej współrzędnej y _0}
W uzyskanej zależności bez trudu rozpoznajemy równanie paraboli.
Rysunek 2.6.2 przedstawia graficzną prezentację rozpatrywanego przez nas ruchu z wyszczególnieniem podstawowych symboli i zależności. W tym przypadku wektor przyspieszenia skierowany jest w stronę przeciwną niż składowa \( v_{y0} \) wektora prędkości. Tor na rysunku odpowiada przypadkowi rzutu ukośnego i może być uznany np. za tor pocisku armatniego w idealnym przypadku braku oporów ruchu.
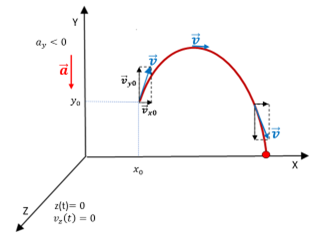
Rysunek 2.6.2. Kinematyka rzutu ukośnego.
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. Oś X wskazuje godzinę trzecią, oś Y wskazuje godzinę dwunastą, oś Z wskazuje godzinę siódmą. W płaszczyźnie XY został wybrany punkt o współrzędnych x _0 i y _0. W tym punkcie zostały zaczepione trzy wektory: wektor prędkości v wskazujący godzinę pierwszą oraz składowe v _x _0 równoległa do osi X i v _y _0 równoległa do osi Y. Wektor v jest styczny do toru, który ma kształt paraboli o ramionach skierowanych w dół. W wierzchołu paraboli jest zaczepiony inny wektor v równoległy do osi X o długości równej długości wektora vx0. W punkcie o współrzędnej y_0 położonym na drugim ramieniu paraboli zaczepiony jest trzeci wektor v wskazujący godzinę piątą i jego składowe. Wektor a jest równoległy do osi Y, lecz ma zwrot przeciwny. Powyżej wektora a umieszczony jest napis a _y jest mniejsze od zera. Obok osi Z znajduje się napis z jako funkcja t jest równe zeru oraz v _z jako funkcja t jest równe zeru}
{Składowa prędkości v _x jako funkcja t jest równa składowej prędkości poczatkowej v _x _0}
{Współrzędna x jako funkcja czasu t jest równa sumie współrzędnej x _0 oraz iloczynu składowej początkowej v _x _0 i czasu t}
{Składowa prędkości v _y jako funkcja t jest równa sumie składowej prędkości poczatkowej v _y _0 oraz ilczynu składowej przyspieszenia a _y i czasu t}
{Współrzędna y jako funkcja czasu t jest równa sumie współrzędnej y _0, iloczynu składowej początkowej v _y _0 i czasu t oraz iloczynu składowej przyspieszenia a _y przez połowę kwadratu czasu t}