2. Kinematyka
5. Przyspieszenie i jego składowe: normalna i styczna i
Przyspieszenie i jego składowe: normalna i styczna i
Zdefiniowaliśmy prędkość jako granicę stosunku przyrostu wektora położenia do przedziału czasu, w którym ten przyrost nastąpił. Podobnie, granicę stosunku przyrostu wektora prędkości do czasu, w którym ten przyrost nastąpił nazywamy przyspieszeniem chwilowym lub krótko - przyspieszeniem. Przyspieszenie jest więc pochodną wektora prędkości względem czasu, a co za tym idzie - drugą pochodną względem czasu wektora położenia. W układzie współrzędnych prostokątnych zapiszemy to w następujący sposób.
{Granica ilorazu przyrostu delta wektora prędkości v przez przyrost delta czasu t przy przyroście czasu t dążącym do zera jest równa pochodnej wektora prędkości v względem czasu t, co jest równe sumie iloczynów pochodnych współrzędnych wektora prędkości (v _x, v _y, v _z) względem czasu t przez odpowiednie wersory i, j, k, a to z kolei równa się drugiej pochodnej wektora położenia r względem czasu, co jest równe wektorowi przyspieszenia a}
Wektor przyspieszenia możemy zapisać jako sumę dwóch prostopadłych do siebie składowych stycznej \( \vec{a_s} \) i normalnej \( \vec{a_n} \):
{wektor przyspieszenia a> równa się sumie wektora przyspieszenia stycznego a_s i wektora przyspieszenia normalnego a_n}
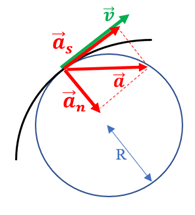
Rysunek 2.5.1. Składowa styczna i normalna przyspieszenia
{Na rysunku przedstawiony został okrąg o promieniu R i fragment krzywoliniowego toru, który ma jeden punkt wspólny z okręgiem. W punkcie styczności zaczepione są wektory: v, a, a _s, a _n. Wektory: v i as są styczne do okręgu i do toru i ma ją ten sam zwrot. Wektor a _n jest prostopadły do wektora as i ma zwrot do środka okręgu. Wektor a jest sumą wektorową a _s i a _n, ma kierunek zgodny z kierunkiem przekątnej prostokąta utworzonego przez wektory a _s i jest zaczepiony w punkcie styczności okręgu i toru.}
Składowa styczna przyspieszenia \( \vec{a_s} \) jest zawsze zgodna z aktualnym kierunkiem wektora prędkości, czyli jest styczna do toru w danym punkcie i jest związana ze zmianą wartości prędkości. Ma ten sam zwrot jak wektor prędkości, gdy ruch jest przyspieszony, a przeciwny zwrot w przypadku ruchu opóźnionego. Można pokazać, że wartość \( a_s \) jest równa pochodnej wartości prędkości:
{Wartość przyspieszenia stycznego a _s jest równa pochodnej wartości prędkości v względem czasu t}
Składowa normalna przyspieszenia \( \vec{a_n} \) jest skierowana do środka okręgu określającego aktualny promień krzywizny toru. Jest związana ze zmianą kierunku ruchu. Można wykazać, że jej wartość \( a_n \) jest równa kwadratowi wartości prędkości podzielonemu przez promień krzywizny toru \( R \).
{Wartość przyspieszenia normalnego a _n jest równa ilorazowi kwadratu wartości prędkości v przez promień krzywizny R}
Zauważmy, że ciało porusza się ruchem przyspieszonym także
wtedy, kiedy bezwzględna wartość jego prędkości nie zmienia się, ale tor jego jest
krzywoliniowy. Szczególnym przypadkiem takiego ruchu jest ruch po okręgu. Przyspieszenie
normalne w przypadku ruchu po okręgu nazywane jest też przyspieszeniem dośrodkowym.