2. Kinematyka
2. Układy współrzędnych i wektor położenia
Układy współrzędnych i wektor położenia
Przy opisie ruchu posługujemy się pojęciem układu współrzędnych, który wiążemy z wybranym przez nas układem odniesienia. Opis ten polega na przyporządkowaniu danemu punktowi P zespołu liczb określających, w każdej chwili czasu w jednoznaczny sposób, jego położenie w przestrzeni oraz kierunek i wartość jego prędkości i przyspieszenia. Wybór układu odniesienia oraz odpowiedniego układu współrzędnych zależy od rodzaju i specyfiki opisywanego ruchu.
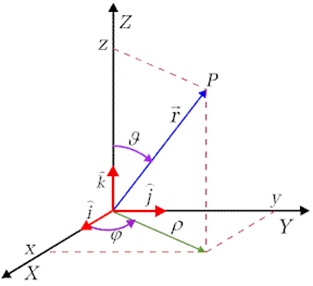
Rysunek 2.2.1. Punkt P i jego współrzędne w przestrzeni trójwymiarowej.
{Na rysunku został przedstawiony układ współrzędnych kartezjańskich o osiach X, Y, Z. Oś X wskazuje godzinę siódmą, oś Y wskazuje godzinę trzecią, oś Z wskazuje godzinę dwunastą. Na każdej z osi zaznaczone są wektory o kierunku i zwrocie odpowiadającej im osi i początku w początku układu współrzędnych. Są to wersory, czyli wektory o długości jeden. W układzie współrzędnych zaznaczono punkt P w ten sposób, że jego wszystkie współrzędne są dodatnie. Wektor o początku w początku układu współrzędnych i końcu w punkcie P jest jego wektorem położenia r. Na płaszczyźnie XY narysowany został wektor ro, którego początek jest w początku układu współrzędnych, a koniec jest rzutem końca wektora położenia r na tę płaszczyznę. Kąt między ro a osią X został oznaczony przez fi, natomiast kąt między wektora położenia r nb a osią Z został oznaczony teta.}
Na Rysunku 2.2.1 pokazane są wielkości określające położenie punktu w przestrzeni trójwymiarowej za pomocą wektora położenia \( \vec{r} \) {r} (zwanego też promieniem wodzącym). Początek tego wektora znajduje się w początku układu współrzędnych, a koniec w danym punkcie przestrzeni. Wektor położenia punktu P zaznaczony jest kolorem niebieskim. Kolorem czerwonym zaznaczone są wersory, czyli wektory o jednostkowych długościach, określające kierunki i zwroty osi układu współrzędnych prostokątnych. ρ {ro} jest rzutem wektora położenia \( \vec{r} \) {r} na płaszczyznę XY ;φ {fi} – kątem między rzutem wektora położenia ρ {ro}, a osią X, natomiast \( \theta \) {teta} jest kątem między promieniem wodzącym \( \vec{r} \) {r} a osią Z.
Więcej informacji o wektorach zawiera plik zamieszczony na stronie przedmiotu Przypomnienie wiadomości o wektorach, pochodnych i całkach.
Układ współrzędnych prostokątnych (kartezjański).
Położenie ciała w układzie współrzędnych prostokątnych wyznaczone jest przez podanie trzech liczb określających współrzędne wektora położenia (x, y, z) względem początku układu (0, 0, 0) na trzech przecinających się w tym punkcie prostopadłych do siebie prostych, zwanych osiami (X, Y, Z). Układ jest prawoskrętny (Rysunek 2.2.1), kiedy obrót osi X w kierunku osi Y wyznacza kierunek osi Z zgodnie z regułą śruby prawoskrętnej. Wektor położenia w układzie prostokątnym jest sumą wektorową wersorów \( \hat{i}, \hat{j}, \hat{k} \) {i, j, k} pomnożonych przez odpowiadające im współrzędne promienia wodzącego:
{wektor położenia r równa się sumie iloczynów wersorów i, j, k przez odpowiadające im współrzędne promienia wodzącego x, y, z}
Długość wektora położenia jest liczbą dodatnią i wynosi
{długość wektora r jest równa pierwiastkowi kwadratowemu sumy kwadratów jego współrzędnych x, y, z}