3. Dynamika
12. Moment siły i moment pędu
Moment siły i moment pędu
Wielkością, która dla ruchu obrotowego stanowi odpowiednik siły w ruchu postępowym, jest moment siły. Moment siły zdefiniowany jest zawsze względem określonego punktu w przestrzeni, choć w czasie ruchu położenie tego punktu może się zmieniać.
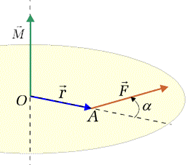
Rysunek 3.12.1. Moment siły.
{Fragment tarczy ustawionej prostopadle do płaszczyzny rysunku. Punkt O jest punktem środkowym tarczy; punkt A leży na tarczy. Wektor r jest wektorem o początku w punkcie O i końcu w punkcie A, ustawiony na godzinę czwartą. Wektor F jest zaczepiony w punkcie A, leży w płaszczyźnie tarczy i tworzy kąt alfa z przedłużeniem wektora r, kierunek i zwrot na godzinę drugą. Wektor M jest prostopadły do tarczy, zaczepiony w punkcie O i ma zwrot do góry}
Rozważmy punkt materialny \( A \), na który działa siła \( \vec{F} \). Na Rysunku 3.12.1 pokazany jest schemat geometryczny ilustrujący definicję momentu siły. Oczywiście, płaszczyzna, w której leżą wektory \( \vec{F} \) i \( \vec{r} \) może być dowolnie ułożona w przestrzeni.
Moment siły \( \vec{F} \) przyłożonej w punkcie \( A \), określony względem punktu \( O \), jest iloczynem wektorowym promienia wodzącego \( \vec{r} \) mającego początek w punkcie \( O \) i siły \( \vec{F} \).
{Wektor momentu siły M jest iloczynem wektorowym wektora promienia wodzącego r i wektora siły F}
Jest to jednocześnie moment siły \( \vec{F} \) względem osi, na której leży punkt \( O \), prostopadłej do płaszczyzny wyznaczonej przez wektory \( \vec{r} \) i \( \vec{F} \).
Na Rysunku 3.12.1. kolorem kremowym zaznaczona jest płaszczyzna wyznaczona przez wektory \( \vec{r} \) i \( \vec{F} \). Zgodnie z definicją iloczynu wektorowego, wektor momentu siły jest prostopadły do tej płaszczyzny. Zwrot tego wektora określony jest przez regułę śruby prawoskrętnej. Bezwzględna wartość momentu siły wynosi:
{Wartość momentu siły M jest równa iloczynowi wartości promienia r, siły F i sinusa kąta alfa}
Wartość momentu siły możemy wyrazić jako iloczyn siły przez składową promienia wodzącego prostopadłą do siły. Składową tę nazywamy ramieniem siły. Jest to odległość kierunku działania siły od osi obrotu.
{Wartość momentu siły M jest równa iloczynowi wartości promienia r, sinusa kąta alfa oraz wartości siły F, co można zapisać jako iloczyn ramienia siły i wartości siły F}
Możemy też wydzielić składową siły prostopadłą do promienia wodzącego. Wówczas wartość momentu siły możemy zapisać w postaci:
{Wartość momentu siły M jest równa iloczynowi wartości promienia r, wartości siły F oraz sinusa kąta alfa, co można zapisać jako iloczyn wartości promienia r i wartości składowej prostopadłej siły F}
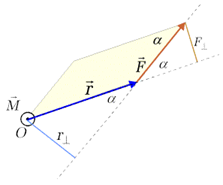
Rysunek 3.12.2. Rzut na płaszczyznę wyznaczoną przez wektor siły \( \vec{F} \) i promień wodzący \( \vec{r} \).
{Wektory promienia r i siły F leżą w jednej płaszczyźnie tworząc równoległobok. Wektor promienia r jest zaczepiony w punkcie O i wskazuje godzinę drugą. Koniec wektora promienia r jest jednocześnie początkiem wektora siły F wskazującego godzinę pierwszą. W punkcie O zaczepiony jest wektor momentu siły M prostopadły do płaszczyzny rysunku o zwrocie do nas. Odcinek prostopadły do prostej działania siły (prostej zawierającej wektor siły F) łączący punkt O z rzutem punktu O na prostą wyznaczoną przez wektor siły F nazywamy ramieniem siły. Odcinek łączący koniec wektora siły F z rzutem końca wektora siły F na prostą wyznaczoną przez wektor promienia r jest składową prostopadłą siły F. Wektor siły F tworzy z prostą wyznaczoną przez wektor promienia r kąt alfa. Wektor promienia r tworzy z prostą wyznaczoną przez wektor siły F również kąt alfa}
Widać, że wartość momentu siły określa składowa promienia wodzącego prostopadła do kierunku działania siły lub składowa siły prostopadła do promienia wodzącego. Kiedy kierunek siły pokrywa się z kierunkiem promienia wodzącego moment siły równy jest zeru. Kolorem kremowym na Rysunku 3.12.2 zaznaczony jest równoległobok oparty na wektorach \( \vec{r} \) i \( \vec{F} \). Pole tego równoległoboku równe jest wartości bezwzględnej momentu siły. Kierunek wektora momentu siły jest w tym przypadku prostopadły do ekranu, a zwrot jest w naszą stronę, co zaznaczamy symbolem \( \odot \) {kółko z kropką w środku}.
Składowa siły prostopadła do promienia wodzącego nadaje punktowi materialnemu o masie \( m \) przyspieszenie zgodne z kierunkiem ruchu punktu, znane nam z lekcji drugiej jako przyspieszenie styczne. Wykorzystując wzór (3.12.3) możemy więc napisać
{Wartość momentu siły M jest równa iloczynowi wartości promienia wodzącego r i wartości składowej prostopadłej siły F, który można zapisać jako iloczyn wartości promienia r, masy m, przyspieszenia stycznego a _s, co daje iloczyn promienia r i masy m pomnożony przez iloczyn promienia r i przyspieszenia kątowego epsilon. To z kolei można zapisać jako iloczyn masy m, drugiej potęgi promienia r i przyspieszenia kątowego epsilon. Ostatecznie zapisujemy jako iloczyn momentu bezwładności I oraz przyspieszenia kątowego epsilon}
Wprowadzona wielkość
{Moment bezwładności I jest równy iloczynowi masy m przez drugą potęgę promienia wodzącego r}
zwana momentem bezwładności punktu materialnego, odgrywa zasadniczą rolę w opisie ruchu obrotowego i będzie omawiana szczegółowo w dalszej części tej lekcji.
Podobnie jak wektor momentu siły określa się wektor momentu pędu względem osi obrotu (lub punktu \( O \)). Jest on równy iloczynowi wektorowemu promienia wodzącego i pędu punktu materialnego.
{Wektor momentu pędu L jest równy iloczynowi wektorowemu wektora promienia r i wektora pędu p, co z kolei jest równe iloczynowi wektorowemu wektora promienia r oraz iloczynu masy m i wektora prędkości v}